- 数据集可用时间
- 2014-10-03T00:00:00Z–2026-06-29T22:56:55Z
- 数据集生产者
- 欧盟/欧洲航天局/哥白尼计划
- 重访周期
- 6 天
- 标签
说明
Sentinel-1 任务通过双极化 C 频段合成孔径雷达 (SAR) 仪器(频率为 5.405GHz,即 C 频段)提供数据。此集合包含使用 Sentinel-1 工具箱处理的 S1 地面探测范围 (GRD) 场景,可生成经过校准的正射校正产品。此合集每天更新一次。新媒体资源会在发布后的两天内被提取。
此集合包含所有 GRD 场景。每个场景都有 3 种分辨率(10 米、25 米或 40 米)、4 种波段组合(对应于场景偏振)和 3 种仪器模式。在镶嵌上下文中,使用集合可能需要过滤到一组同质的波段和参数。如需详细了解集合使用和预处理,请参阅这篇文章。每个场景包含 4 个可能的偏振频段中的 1 个或 2 个,具体取决于设备的偏振设置。可能的组合包括单频段 VV、单频段 HH、双频段 VV+VH 和双频段 HH+HV:
- VV:单极化,垂直发射/垂直接收
- HH:单极化,水平发射/水平接收
- VV + VH:双频段交叉极化,垂直发射/水平接收
- HH + HV:双频段交叉极化,水平发射/垂直接收
每个场景还包含一个额外的“角度”波段,其中包含每个点的近似椭球入射角度(以度为单位)。 此波段是通过对每个资产提供的“geolocationGridPoint”网格化字段的“incidenceAngle”属性进行插值生成的。
每个场景都使用 Sentinel-1 Toolbox 进行了预处理,具体步骤如下:
- 热噪声消除
- 辐射定标
- 使用 SRTM 30 或 ASTER DEM 对纬度高于 60 度的区域进行地形校正,其中 SRTM 不可用。最终的已进行地形校正的值通过对数缩放 (10*log10(x)) 转换为分贝。
如需详细了解这些预处理步骤,请参阅 Sentinel-1 预处理文章。如需有关使用 Sentinel-1 影像的更多建议,请参阅 Guido Lemoine 关于 SAR 基础知识的教程和 Mort Canty 关于 SAR 变化检测的教程。
此集合是临时计算的。如果您想使用具有原始功率值(更新速度更快)的基础集合,请参阅 COPERNICUS/S1_GRD_FLOAT。
频段
波段
像素大小:各不相同
| 名称 | 单位 | 最小值 | 最大值 | 像素大小 | 说明 |
|---|---|---|---|---|---|
HH |
分贝 | -50* | 1* | 10 米 | 单同极化,水平发射/水平接收 |
HV |
分贝 | -50* | 1* | 10 米 | 双频段交叉极化,水平发射/垂直接收 |
VV |
分贝 | -50* | 1* | 10 米 | 单同极化,垂直发射/垂直接收 |
VH |
分贝 | -50* | 1* | 10 米 | 双频段交叉极化,垂直发射/水平接收 |
angle |
度 | 0* | 90* | 20000 米 | 根据椭圆体近似计算入射角 |
图片属性
图像属性
| 名称 | 类型 | 说明 |
|---|---|---|
| GRD_Post_Processing_facility_country | STRING | 设施所在的国家/地区的名称。此元素可在 IPF 中配置。 |
| GRD_Post_Processing_facility_name | STRING | 执行处理步骤的设施的名称。此元素可在 IPF 中配置。 |
| GRD_Post_Processing_facility_organisation | STRING | 负责相应设施的组织的名称。 此元素可在 IPF 中配置。 |
| GRD_Post_Processing_facility_site | STRING | 设施的地理位置。此元素可在 IPF 中配置。 |
| GRD_Post_Processing_software_name | STRING | 软件名称。 |
| GRD_Post_Processing_software_version | STRING | 软件版本标识。 |
| GRD_Post_Processing_start | 双精度 | 处理开始时间。 |
| GRD_Post_Processing_stop | 双精度 | 处理停止时间。 |
| SLC_Processing_facility_country | STRING | 设施所在的国家/地区的名称。 此元素可在 IPF 中配置。 |
| SLC_Processing_facility_name | STRING | 执行处理步骤的设施的名称。此元素可在 IPF 中配置。 |
| SLC_Processing_facility_organisation | STRING | 负责相应设施的组织的名称。 此元素可在 IPF 中配置。 |
| SLC_Processing_facility_site | STRING | 设施的地理位置。此元素可在 IPF 中配置。 |
| SLC_Processing_software_name | STRING | 软件名称。 |
| SLC_Processing_software_version | STRING | 软件版本标识。 |
| SLC_Processing_start | 双精度 | 处理开始时间。 |
| SLC_Processing_stop | 双精度 | 处理停止时间。 |
| S1TBX_Calibration_Operator_version | STRING | Sentinel-1 Toolbox 校准工具版本。 |
| S1TBX_SAR_Processing_version | STRING | Sentinel-1 Toolbox SAR 处理工具版本。 |
| SNAP_Graph_Processing_Framework_GPF_version | STRING | Sentinel 应用平台 (SNAP) 版本。 |
| startTimeANX | 双精度 | 输入数据的感测开始时间(相对于升交点穿越)。这是自轨道升交点穿越以来经过的时间 [毫秒]。 |
| stopTimeANX | 双精度 | 相对于升交点穿越的输入数据感测停止时间。这是自轨道升交点穿越以来经过的时间 [毫秒]。 |
| nssdcIdentifier | STRING | 根据世界卫星信息数据中心 (WDC-SI) 定义的标准唯一标识任务,相关信息可点击此处查看。 |
| familyName | STRING | 任务的全名。例如“SENTINEL-1” |
| platform_number | STRING | 任务中平台的字母数字标识符。 |
| platformHeading | 双精度 | 平台相对于北方的航向(以度为单位) |
| 插桩 | STRING | 与采集数据的平台上的仪器相关的信息。 |
| instrumentMode | STRING | IW(干涉宽幅)、SM(条带地图)或 EW(超宽幅)。 请参阅商品详情。 |
| instrumentSwath | STRING | 商品中包含的条带的列表。大多数产品将仅包含一个条带,但 TOPS SLC 产品除外,它们包含 3 个或 5 个条带。 |
| orbitNumber_start | 双精度 | 图片数据中最旧行的绝对轨道号。 |
| orbitNumber_stop | 双精度 | 图像数据中最新行的绝对轨道号。 |
| relativeOrbitNumber_start | 双精度 | 图片数据中最旧行的相对轨道号。 |
| relativeOrbitNumber_stop | 双精度 | 图片数据中最新一行的相对轨道号。 |
| cycleNumber | 双精度 | 最旧的图片数据所对应的任务周期的绝对序列号。 |
| phaseIdentifier | 双精度 | 最早的图片数据所适用的任务阶段的 ID。 |
| orbitProperties_pass | STRING | 产品中最旧的影像数据(产品开始时)的轨道方向(“ASCENDING”或“DESCENDING”)。 |
| orbitProperties_ascendingNodeTime | 双精度 | 轨道升交点的世界协调时间。此元素适用于所有产品,但从 ASAR L1 输入源生成的 ASAR L2 OCN 产品除外。 |
| 分辨率 | STRING | H 表示高,M 表示中。 |
| resolution_meters | 双精度 | 分辨率(以米为单位)。 |
| instrumentConfigurationID | 双精度 | 相应数据的器械配置 ID(Radar 数据库 ID)。 |
| missionDataTakeID | 双精度 | 任务中数据采集的唯一 ID。 |
| transmitterReceiverPolarisation | STRING_LIST | 数据的发射/接收极化。每个发射/接收组合对应一个元素:['VV']、['HH']、['VV', 'VH'] 或 ['HH', 'HV']。 |
| productClass | STRING | 对于注释,输出商品类别“A”;对于标准,输出商品类别“S”。 |
| productClassDescription | STRING | 输出商品类的文本说明。 |
| productComposition | STRING | 相应商品的构成类型:“Individual”“Slice”或“Assembled”。 |
| productType | STRING | 相应商品的商品类型(校正级别)。 |
| productTimelinessCategory | STRING | 描述处理的所需及时性。 以下各项之一:NRT-10m、NRT-1h、NRT-3h、Fast-24h、Off-line 或 Reprocessing |
| sliceProductFlag | STRING | 如果这是较大产品的切片,则为 true;如果这是完整的产品,则为 false。 |
| segmentStartTime | 双精度 | 相应切片所属细分的感应开始时间。只有当 sliceProductFlag = true 时,此字段才会显示 |
| sliceNumber | 双精度 | 相应切片的绝对切片编号,从 1 开始。 只有当 sliceProductFlag = true 时,此字段才会显示。 |
| totalSlices | 双精度 | 完整数据拍摄中的切片总数。 只有当 sliceProductFlag = true 时,此字段才会显示。 |
使用条款
使用条款
使用 Sentinel 数据须遵守哥白尼计划 Sentinel 数据条款及条件。
通过 Earth Engine 探索
代码编辑器 (JavaScript)
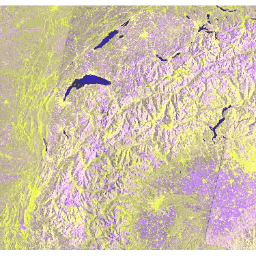
var imgVV = ee.ImageCollection('COPERNICUS/S1_GRD') .filter(ee.Filter.listContains('transmitterReceiverPolarisation', 'VV')) .filter(ee.Filter.eq('instrumentMode', 'IW')) .select('VV') .map(function(image) { var edge = image.lt(-30.0); var maskedImage = image.mask().and(edge.not()); return image.updateMask(maskedImage); }); var desc = imgVV.filter(ee.Filter.eq('orbitProperties_pass', 'DESCENDING')); var asc = imgVV.filter(ee.Filter.eq('orbitProperties_pass', 'ASCENDING')); var spring = ee.Filter.date('2015-03-01', '2015-04-20'); var lateSpring = ee.Filter.date('2015-04-21', '2015-06-10'); var summer = ee.Filter.date('2015-06-11', '2015-08-31'); var descChange = ee.Image.cat( desc.filter(spring).mean(), desc.filter(lateSpring).mean(), desc.filter(summer).mean()); var ascChange = ee.Image.cat( asc.filter(spring).mean(), asc.filter(lateSpring).mean(), asc.filter(summer).mean()); Map.setCenter(5.2013, 47.3277, 12); Map.addLayer(ascChange, {min: -25, max: 5}, 'Multi-T Mean ASC', true); Map.addLayer(descChange, {min: -25, max: 5}, 'Multi-T Mean DESC', true);
import ee import geemap.core as geemap
Colab (Python)
def mask_edge(image): edge = image.lt(-30.0) masked_image = image.mask().And(edge.Not()) return image.updateMask(masked_image) img_vv = ( ee.ImageCollection('COPERNICUS/S1_GRD') .filter(ee.Filter.listContains('transmitterReceiverPolarisation', 'VV')) .filter(ee.Filter.eq('instrumentMode', 'IW')) .select('VV') .map(mask_edge) ) desc = img_vv.filter(ee.Filter.eq('orbitProperties_pass', 'DESCENDING')) asc = img_vv.filter(ee.Filter.eq('orbitProperties_pass', 'ASCENDING')) spring = ee.Filter.date('2015-03-01', '2015-04-20') late_spring = ee.Filter.date('2015-04-21', '2015-06-10') summer = ee.Filter.date('2015-06-11', '2015-08-31') desc_change = ee.Image.cat( desc.filter(spring).mean(), desc.filter(late_spring).mean(), desc.filter(summer).mean(), ) asc_change = ee.Image.cat( asc.filter(spring).mean(), asc.filter(late_spring).mean(), asc.filter(summer).mean(), ) m = geemap.Map() m.set_center(5.2013, 47.3277, 12) m.add_layer(asc_change, {'min': -25, 'max': 5}, 'Multi-T Mean ASC', True) m.add_layer(desc_change, {'min': -25, 'max': 5}, 'Multi-T Mean DESC', True) m