- 数据集可用时间
- 1985-01-01T00:00:00Z–2023-12-31T00:00:00Z
- 数据集生产者
- 美国农业部林务局 (USFS) 地理空间技术与应用中心 (GTAC)
- 标签
说明
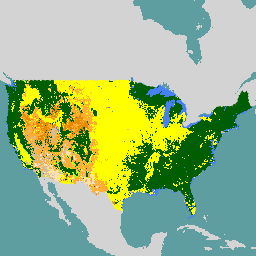
此产品是景观变化监测系统 (LCMS) 数据套件的一部分。它显示了涵盖美国本土(CONUS)和美国本土以外(OCONUS)区域(包括阿拉斯加东南部 [SEAK]、波多黎各-美属维尔京群岛 [PRUSVI] 和夏威夷 [HI])的每个年份的 LCMS 模式变化、土地覆盖和/或土地利用类别。
LCMS 是一种基于遥感技术的系统,用于绘制和监控美国各地的景观变化。其目标是开发一种一致的方法,利用最新的技术和变更检测方面的进展,生成“最佳可用”的地貌变化地图。
输出包括三种年度产品:变化、土地覆盖和土地利用。变化专门指植被覆盖,包括缓慢损失、快速损失(也包括水文变化,例如淹没或干旱)和增加。这些值是针对 Landsat 时序的每个年份预测的,是 LCMS 的基础产品。土地覆盖和土地利用地图描绘了每年的生命形式级土地覆盖和广义级土地利用情况。
由于没有哪种算法在所有情况下都能表现出色,因此 LCMS 使用模型集成作为预测器,从而提高各种生态系统和变化过程中的地图准确性(Healey 等人,2018 年)。由此产生的一系列 LCMS 变化、土地覆盖和土地利用地图全面展示了自 1985 年以来美国各地的地貌变化。
LCMS 模型的预测器层包括 LandTrendr 和 CCDC 变化检测算法的输出数据以及地形信息。而所有这些数据的获取与处理,均依托 Google Earth Engine 平台完成(Gorelick 等人,2017 年)。
对于 CCDC,我们使用了美国地质调查局 (USGS) Collection 2 Landsat Tier 1 地表反射率数据(针对美国本土),以及 Landsat Tier 1 大气层顶反射率数据(针对 SEAK、PRUSVI 和 HI)。为生成 LandTrendr 的年度合成影像,我们使用了 USGS Collection 2 Landsat Tier 1 和 Sentinel 2A、2B Level-1C 的大气层顶反射率数据。我们使用 cFmask 云遮罩算法(Foga 等人,2017 年)- Fmask 2.0(Zhu 和 Woodcock,2012 年)(仅限 Landsat)算法的一个实现、cloudScore(Chastain 等人,2019 年)(仅限 Landsat)、s2cloudless(Sentinel-Hub,2021 年)和 Cloud Score plus(Pasquarella 等人,2023 年)(仅限 Sentinel 2)来遮盖云层;同时使用 TDOM(Chastain 等人,2019 年)来遮盖云影(Landsat 和 Sentinel 2)。对于 LandTrendr,我们会计算年度中心点 (annual medoid),将每年无云和无云影的像素值汇总成一幅单一的合成影像。
我们使用 LandTrendr(Kennedy 等人,2010 年;Kennedy 等人,2018 年;Cohen 等人,2018 年)对合成时间序列进行时序分割。
所有无云和无云阴影的值也使用 CCDC 算法(Zhu 和 Woodcock,2014 年)进行时间分段。
预测变量数据包括原始合成值、LandTrendr 拟合值、成对差值、分段持续时间、变化幅度及斜率,以及 CCDC 正弦和余弦系数(前 3 个谐波)、拟合值和成对差值,连同源自 10 米 USGS 3D 高程计划 (3DEP) 数据(美国地质调查局,2019 年)的高程、坡度、坡向正弦、坡向余弦和地形位置指数(Weiss,2001 年)。
参考数据是使用 TimeSync(一种基于 Web 的工具)收集的,该工具可帮助分析师直观呈现和解读 1984 年至今的 Landsat 数据记录(Cohen 等人,2010 年)。
我们使用 TimeSync 中的参考数据和 LandTrendr、CCDC 及地形指数中的预测数据训练了随机森林模型 (Breiman, 2001),以预测年度变化、土地覆盖和土地利用类别。在建模之后,我们使用辅助数据集建立了一系列概率阈值和规则集,以改进定性地图输出并减少误判和漏判。如需了解详情,请参阅“说明”中包含的 LCMS 方法简介。
其他资源
LCMS Data Explorer 是一款基于 Web 的应用,可让用户查看、分析、总结和下载 LCMS 数据。
如需详细了解方法和精度评估结果,请参阅 LCMS 方法简介;如需下载数据、查看元数据和支持文档,请访问 LCMS 地理数据交换中心。
CONUS 土地利用产品已于 2024 年 7 月 2 日更新,以修正开发类存在的问题。
PRUSVI 和 HI 数据于 2024 年 10 月 1 日发布。
如有任何疑问或具体的数据请求,请发送邮件至 [sm.fs.lcms@usda.gov]。
频段
波段
像素大小:30 米(所有波段)
| 名称 | 像元大小 | 说明 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Change |
30 米 | 最终主题 LCMS 更改产品。系统会针对每一年映射总共三个变化类别(缓慢损失、快速损失和增加)。每个类都使用单独的随机森林模型进行预测,该模型会输出像素属于相应类别的概率(随机森林模型中树的比例)。因此,每个像素每年都有三种不同的模型输出。最终类别会分配给概率最高且高于指定阈值的更改类别。如果某个像素没有任何值高于相应类别的阈值,则会将其分配给“稳定”类别。在分配变化类别之前,我们对所有研究区域应用了一项规则,以防止非植被地表覆盖发生变化。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover |
30 米 | 最终的主题 LCMS 地表覆盖产品。我们每年都会使用 TimeSync 参考数据和从 Landsat 影像中提取的光谱信息,绘制总共 14 个土地覆盖类别的地图。每个类别都使用单独的随机森林模型进行预测,该模型会输出像素属于相应类别的概率(随机森林模型中树的比例)。因此,每个像素在每一年都有 14 种不同的模型输出,最终类别会分配给概率最高的土地覆盖。对于阿拉斯加东南部,在分配概率最高的土地覆盖类别之前,实施了一项土地覆盖规则,以限制海平面大型潮间带的树木和积雪土地覆盖类别误判。未对美国本土、波多黎各-美属维尔京群岛或夏威夷应用任何土地覆盖规则。14 个土地覆盖类别中有 7 个表示单一土地覆盖,其中该土地覆盖类型覆盖了像素的大部分区域,而没有其他类别的覆盖面积超过像素的 10%。此外,还有 7 门混合课程。这些像素表示其他地表覆盖类别至少覆盖了像素的 10%。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Use |
30 米 | 最终专题 LCMS 土地利用产品。使用 TimeSync 参考数据和从 Landsat 影像中提取的光谱信息,每年可绘制总共 6 个土地利用类别的地图。 每个类别都使用单独的随机森林模型进行预测,该模型会输出像素属于相应类别的概率(随机森林模型中树的比例)。 因此,每个像素每年都有 6 种不同的模型输出,最终类别会分配给概率最高的土地利用类型。在分配概率最高的土地利用类别之前,我们应用了一系列使用辅助数据集土地利用规则的概率阈值和规则集。如需详细了解概率阈值和规则集,请参阅“说明”中包含的 LCMS 方法简介。CONUS 土地利用产品已于 2024 年 7 月 2 日更新,以更正开发类别存在的问题。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Change_Raw_Probability_Slow_Loss |
30 米 | 慢速损失的原始 LCMS 建模概率。定义为:慢速损失包括以下来自 TimeSync 更改流程解释的类别 -
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Change_Raw_Probability_Fast_Loss |
30 米 | 快速损失的原始 LCMS 建模概率。定义为:快速丢失包括 TimeSync 更改过程解释中的以下类别:
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Change_Raw_Probability_Gain |
30 米 | 增益的原始 LCMS 建模概率。定义为:由于生长和演替,植被覆盖率在一年或多年内有所增加的土地。适用于可能表现出与植被再生相关的光谱变化的任何区域。在发达地区,增长可能源于成熟的植被和/或新安装的草坪和景观。在森林中,生长包括从裸露地面开始的植被生长,以及中等高度和共同优势树木和/或低矮的草和灌木的生长。在森林采伐后记录的增长/恢复区段可能会随着森林的再生而经历不同的地表覆盖类别。若要将这些变化视为增长/恢复,光谱值应紧密遵循上升趋势线(例如,正斜率,如果延长到约 20 年,则 NDVI 的数量级为 0.10 单位),并且持续数年。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Trees |
30 米 | 树木的原始 LCMS 建模概率。定义为:像素的大部分由活树或枯立木组成。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Tall-Shrubs-and-Trees-Mix |
30 米 | Tall Shrubs and Trees Mix(仅限东南阿拉斯加)的原始 LCMS 建模概率。定义为:像素的大部分由高度超过 1 米的灌木组成,并且至少包含 10% 的活树或枯立木。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Shrubs-and-Trees-Mix |
30 米 | 灌木和树木混合的原始 LCMS 建模概率。定义为:像素的大部分由灌木组成,并且至少有 10% 由活树或枯立木组成。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Grass-Forb-Herb-and-Trees-Mix |
30 米 | 草类/禾草类/草本植物和树木混合的原始 LCMS 建模概率。定义为:像素的大部分由多年生草、草本植物或其他草本植被组成,并且至少有 10% 的活树或枯立木。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Barren-and-Trees-Mix |
30 米 | 贫瘠土地和树木混合的原始 LCMS 建模概率。定义为:像素的大部分由扰动暴露的裸土(例如,机械清理或森林采伐暴露的土壤)以及常年贫瘠的区域(例如沙漠、干盐湖、露岩地(包括因地表采矿活动而暴露的矿物和其他地质材料)、沙丘、盐碱滩和海滩)组成。由泥土和碎石铺成的道路也被视为贫瘠土地,并且至少包含 10% 的活树或枯立木。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Tall-Shrubs |
30 米 | 原始 LCMS 建模的灌木(仅限东南阿拉斯加)概率。定义为:像素的大部分由高度超过 1 米的灌木组成。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Shrubs |
30 米 | 灌木的原始 LCMS 建模概率。定义为:像素的大部分由灌木组成。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Grass-Forb-Herb-and-Shrubs-Mix |
30 米 | 草类/草本植物/草本植物和灌木混合物的原始 LCMS 建模概率。定义为:像素的大部分由多年生草、草本植物或其他草本植被组成,并且至少包含 10% 的灌木。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Barren-and-Shrubs-Mix |
30 米 | 贫瘠和灌木混合的原始 LCMS 建模概率。定义为:像素的大部分由扰动暴露的裸土(例如,机械清理或森林采伐暴露的土壤)以及常年贫瘠的区域(例如沙漠、干盐湖、露岩地(包括因地表采矿活动而暴露的矿物和其他地质材料)、沙丘、盐碱滩和海滩)组成。由泥土和碎石铺成的道路也被视为贫瘠土地,并且至少包含 10% 的灌木。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Grass-Forb-Herb |
30 米 | 草/禾草/草本植物的原始 LCMS 建模概率。定义为:像素的大部分由多年生草、草本植物或其他形式的草本植被组成。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Barren-and-Grass-Forb-Herb-Mix |
30 米 | 贫瘠土地和草/禾草/草本植物混合物的原始 LCMS 建模概率。定义为:像素的大部分由扰动暴露的裸露土壤(例如,机械清理或森林采伐后暴露的土壤)以及常年贫瘠的区域(例如沙漠、干盐湖、岩石露头 [包括地表采矿活动暴露的矿物和其他地质材料]、沙丘、盐碱滩和海滩)组成。由泥土和碎石铺成的道路也被视为贫瘠土地,并且至少包含 10% 的多年生草、草本植物或其他草本植被。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Barren-or-Impervious |
30 米 | 贫瘠或不透水地表的原始 LCMS 建模概率。定义为:像素的大部分由以下部分组成:1.) 因扰动而暴露的裸土(例如因机械清理或森林采伐而暴露的土壤),以及常年贫瘠的区域,例如沙漠、干盐湖、露岩(包括因地表采矿活动而暴露的矿物和其他地质材料)、沙丘、盐碱滩和海滩。由泥土和碎石铺成的道路也被视为贫瘠土地;2.) 水无法渗透的人造材料,例如铺砌的道路、屋顶和停车场。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Snow-or-Ice |
30 米 | 雪或冰的原始 LCMS 建模概率。定义为:大部分像素由雪或冰组成。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Water |
30 米 | 水的原始 LCMS 建模概率。定义为:像素的大部分由水组成。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Use_Raw_Probability_Agriculture |
30 米 | 农业的原始 LCMS 建模概率。定义为:用于生产食物、纤维和燃料的土地,处于植被覆盖状态或无植被状态。这包括但不限于耕种和未耕种的农田、草料地、果园、葡萄园、圈养牲畜作业区,以及种植水果、坚果或浆果的生产区。主要用于农业用途(即不用于城镇间的公共交通)的道路被视为农业用地。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Use_Raw_Probability_Developed |
30 米 | “发达”的原始 LCMS 建模概率。定义为:被人造结构(例如高密度住宅、商业、工业、采矿或交通)覆盖的土地,或植被(包括树木)和结构(例如低密度住宅、草坪、休闲设施、墓地、交通和公用事业走廊等)的混合体,包括因人类活动而发生功能性改变的任何土地。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Use_Raw_Probability_Forest |
30 米 | 森林的原始 LCMS 建模概率。定义为:已种植或自然植被覆盖的土地,在近期演替序列中的某个时间点,其树木覆盖率达到(或可能达到)10% 或更高。这可能包括天然森林、人工林和木本湿地的落叶、常绿和/或混合类别。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Use_Raw_Probability_Non-Forest-Wetland |
30 米 | 非森林湿地的原始 LCMS 建模概率。定义为:邻近或位于可见地下水位(永久或季节性饱和)的土地,以灌木或多年生挺水植物为主。这些湿地可能位于湖泊、河道或河口沿岸;位于河流洪泛平原上;位于孤立的集水区;或位于坡地上。它们也可能出现在农业景观中,以草原洼地、排水沟和畜牧池塘的形式存在,还可能出现在湖泊或河流中间,以岛屿的形式存在。其他示例还包括沼泽、泥沼、湿地、烂泥地、苔藓沼泽、死水塘、沼泽地和河口湾。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Use_Raw_Probability_Other |
30 米 | 其他类别的原始 LCMS 建模概率。定义为:根据光谱趋势或其他支持性证据,土地(无论用途)上发生了扰动或变化事件,但无法确定确切原因,或者变化类型不符合上述任何变化过程类别。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Use_Raw_Probability_Rangeland-or-Pasture |
30 米 | 草原或牧场的原始 LCMS 建模概率。定义为:此类包含以下任何区域:a.) 草地,其中植被是本地草类、灌木、草本植物和类草植物的混合体,主要由降雨、温度、海拔和火灾等自然因素和过程形成,但有限的管理可能包括规定燃烧以及家养和野生草食动物的放牧;或 b.) 牧场,植被可能包括混合的、主要为天然的草类、草本植物和药草,也可能包括经过管理、以播种和管理来维持近乎单一栽培的草类为主的植被。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
QA_Bits |
30 米 | 有关年度 LCMS 产品输出值来源的辅助信息。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
更改类别表
| 值 | 颜色 | 说明 |
|---|---|---|
| 1 | #3d4551 | 稳定 |
| 2 | #f39268 | 缓慢损失 |
| 3 | #d54309 | 快速损失 |
| 4 | #00a398 | 收益 |
| 5 | #1b1716 | 非处理区域遮罩 |
Land_Cover 类表
| 值 | 颜色 | 说明 |
|---|---|---|
| 1 | #005e00 | 树 |
| 2 | #008000 | 高灌木和树木混合(仅限东南亚) |
| 3 | #00cc00 | 灌木和树木混合 |
| 4 | #b3ff1a | 草/草本植物/香草和树木混合 |
| 5 | #99ff99 | 荒地与树木混合 |
| 6 | #b30088 | 高灌木(仅限东南亚) |
| 7 | #e68a00 | 灌木 |
| 8 | #ffad33 | 草类/草本植物/灌木混合 |
| 9 | #ffe0b3 | 贫瘠土地和灌木丛合辑 |
| 10 | #ffff00 | 草类/草本植物/药草 |
| 11 | #aa7700 | 贫瘠土地和草/多年生草本植物/草本植物混合 |
| 12 | #d3bf9b | 贫瘠或不透水 |
| 13 | #ffffff | 下雪或结冰 |
| 14 | #4780f3 | 水 |
| 15 | #1b1716 | 非处理区域遮罩 |
Land_Use 类别表
| 值 | 颜色 | 说明 |
|---|---|---|
| 1 | #efff6b | 农业 |
| 2 | #ff2ff8 | 开发 |
| 3 | #1b9d0c | 森林 |
| 4 | #97ffff | 非森林湿地 |
| 5 | #a1a1a1 | 其他 |
| 6 | #c2b34a | 草地或牧场 |
| 7 | #1b1716 | 非处理区域遮罩 |
图片属性
图像属性
| 名称 | 类型 | 说明 |
|---|---|---|
| study_area | STRING | LCMS 目前覆盖美国本土、阿拉斯加东南部、波多黎各-美属维尔京群岛和夏威夷。此版本包含美国本土、阿拉斯加东南部、波多黎各-美属维尔京群岛和夏威夷的输出数据。 可能的值:'CONUS, SEAK, PRUSVI, HI' |
| 年 | INT | 产品的年份 |
使用条款
使用条款
美国农业部林务局不作任何明示或暗示的保证,包括对适销性和特定用途适用性的保证,也不对这些地理空间数据的准确性、可靠性、完整性或效用承担任何法律责任或义务,或因不当或不正确使用这些地理空间数据而产生的后果承担任何法律责任或义务。这些地理空间数据及相关地图或图形并非法律文件,也不得用作法律文件。不得使用这些数据和地图来确定产权、所有权、法律说明或边界、法律管辖权,或可能对公共土地或私人土地施加的限制。 数据和地图可能未标示自然灾害,土地使用者应谨慎行事。数据是动态的,可能随时间变化。用户有责任核实地理空间数据的局限性,并据此使用数据。
这些数据由美国政府资助收集,无需额外许可或费用即可使用。如果您在出版物、演示文稿或其他研究产品中使用这些数据,请按如下格式引用:
美国农业部林务局。2024 年。美国林务局景观变化监测系统 v2023.9(美国本土和美国本土以外的美国本土)。犹他州盐湖城。
引用
美国农业部林务局。2024 年。美国林务局景观变化监测系统 v2023.9(美国本土和美国本土以外的美国本土)。犹他州盐湖城。
Breiman, L.,2001 年。随机森林。刊载于《机器学习》栏目。Springer,45:5-32。 doi:10.1023/A:1010933404324
Chastain, R.、Housman, I.、Goldstein, J.、Finco, M. 和 Tenneson, K.,2019 年。 针对美国本土上空的 Sentinel-2A 和 2B MSI、Landsat-8 OLI 及 Landsat-7 ETM 传感器的跨传感器大气层顶光谱特性实证比较。刊载于《环境遥感》期刊。Science Direct,221:274-285。doi:10.1016/j.rse.2018.11.012
Cohen, W. B., Yang, Z. 和 Kennedy, R.,2010 年。使用年度 Landsat 时序数据检测森林扰动和恢复趋势:2. TimeSync - 用于校准和验证的工具。刊载于《环境遥感》期刊。Science Direct,114(12):2911-2924。doi:10.1016/j.rse.2010.07.010
Cohen, W. B.、Yang, Z.、Healey, S. P.、Kennedy, R. E. 和 Gorelick, N., 2018 年。一种用于森林扰动检测的 LandTrendr 多光谱集成方法。刊载于《环境遥感》期刊。Science Direct,205:131-140。 doi:10.1016/j.rse.2017.11.015
Foga, S.、Scaramuzza, P.L.、Guo, S.、Zhu, Z.、Dilley, R.D.、Beckmann, T.、Schmidt, G.L.、Dwyer, J.L.、Hughes, M.J.、Laue, B.,2017 年。面向业务化 Landsat 数据产品的云检测算法比较与验证。刊载于《环境遥感》期刊。Science Direct,194:379-390。 doi:10.1016/j.rse.2017.03.026
美国地质调查局,2019 年。USGS 3D 高程计划数字高程模型,于 2022 年 8 月访问,网址为 https://developers.google.com/earth-engine/datasets/catalog/USGS_3DEP_10m
Healey, S. P. Cohen, W. B.、Yang, Z.、Kenneth Brewer, C.、Brooks, E. B., Gorelick, N.、Hernandez, A. J. Huang, C.、Joseph Hughes, M.、Kennedy, R. E., Loveland, T. R., Moisen, G. G. Schroeder, T. A., Stehman, S. V., Vogelmann, J. E., Woodcock, C. E., Yang, L. 和 Zhu, Z.,2018 年。使用堆叠泛化方法绘制森林变化图:一种集成方法。刊载于《环境遥感》期刊。Science Direct,204:717-728。 doi:10.1016/j.rse.2017.09.029
Kennedy, R. E.、Yang, Z. 和 Cohen, W. B., 2010 年。使用年度 Landsat 时序数据检测森林扰动和恢复趋势:1.LandTrendr - 时间分割算法。刊载于《环境遥感》期刊。Science Direct,114(12):2897-2910。doi:10.1016/j.rse.2010.07.008
Kennedy, R.、Yang, Z.、Gorelick, N.、Braaten, J.、Cavalcante, L.、Cohen, W. 和 Healey, S. 2018 年。在 Google Earth Engine 上实现 LandTrendr 算法。刊载于《遥感》期刊。MDPI,10(5):691。doi:10.3390/rs10050691
Pasquarella, V. J., Brown, C. F.、Czerwinski, W. 和 Rucklidge, W. J., 2023 年。使用弱监督视频学习对光学卫星图像进行全面质量评估。收录于《IEEE/CVF 计算机视觉与模式识别会议论文集》。2125-2135。 doi:10.1109/CVPRW59228.2023.00206
Sentinel-Hub,2021 年。Sentinel 2 Cloud Detector。[在线]。可在以下网址获取: https://github.com/sentinel-hub/sentinel2-cloud-detector
Weiss, A.D.、2001 年。地形位置和地貌分析,海报展示,ESRI 用户大会,加利福尼亚州圣地亚哥,Zhu, Z. 和 Woodcock, C. E. 2012。Landsat 影像中基于对象的云与云影检测。118:83-94。
Zhu, Z. 和 Woodcock, C. E., 2012。Landsat 影像中基于对象的云与云影检测。刊载于《环境遥感》期刊。Science Direct,118:83-94。doi:10.1016/j.rse.2011.10.028
Zhu, Z. 和 Woodcock, C. E., 2014 年。使用所有可用的 Landsat 数据对地表覆盖进行持续的变更检测和分类。刊载于《环境遥感》期刊。Science Direct,144:152-171。 doi:10.1016/j.rse.2014.01.011
DOI
- https://doi.org/10.1016/j.rse.2010.07.008
- https://doi.org/10.1016/j.rse.2010.07.010
- https://doi.org/10.1016/j.rse.2011.10.028
- https://doi.org/10.1016/j.rse.2014.01.011
- https://doi.org/10.1016/j.rse.2017.03.026
- https://doi.org/10.1016/j.rse.2017.09.029
- https://doi.org/10.1016/j.rse.2017.11.015
- https://doi.org/10.1016/j.rse.2018.11.012
- https://doi.org/10.1023/A:1010933404324
- https://doi.org/10.1109/CVPRW59228.2023.00206
- https://doi.org/10.3390/rs10050691
通过 Earth Engine 探索
代码编辑器 (JavaScript)
var dataset = ee.ImageCollection('USFS/GTAC/LCMS/v2023-9'); var lcms = dataset.filterDate('2021', '2022') // range: [1985, 2023] .filter('study_area == "CONUS"') // or "SEAK"; "PRUSVI"; "HAWAII" .first(); Map.addLayer(lcms.select('Land_Cover'), {}, 'Land Cover'); Map.addLayer(lcms.select('Land_Use'), {}, 'Land Use'); Map.addLayer(lcms.select('Change'), {}, 'Vegetation Change', false); Map.setCenter(-98.58, 38.14, 4);