本節說明如何搭配使用 Navigation SDK 和車輛專用 Android App Library,在車載車用運算主機上顯示應用程式的導航體驗。如果車載系統支援 Android Auto,使用者只要將手機連上車載系統,就能直接在車輛螢幕上使用您的應用程式。語音導覽也會透過車輛喇叭播放。

車輛專用 Android App Library 提供一組通過駕駛人安全審核的視覺範本,讓 Android 應用程式能在 Android Auto 上執行。這些範本會刻意限制資訊主頁 UI 控制項,避免與手機的控制項重複,以減少駕駛人分心。
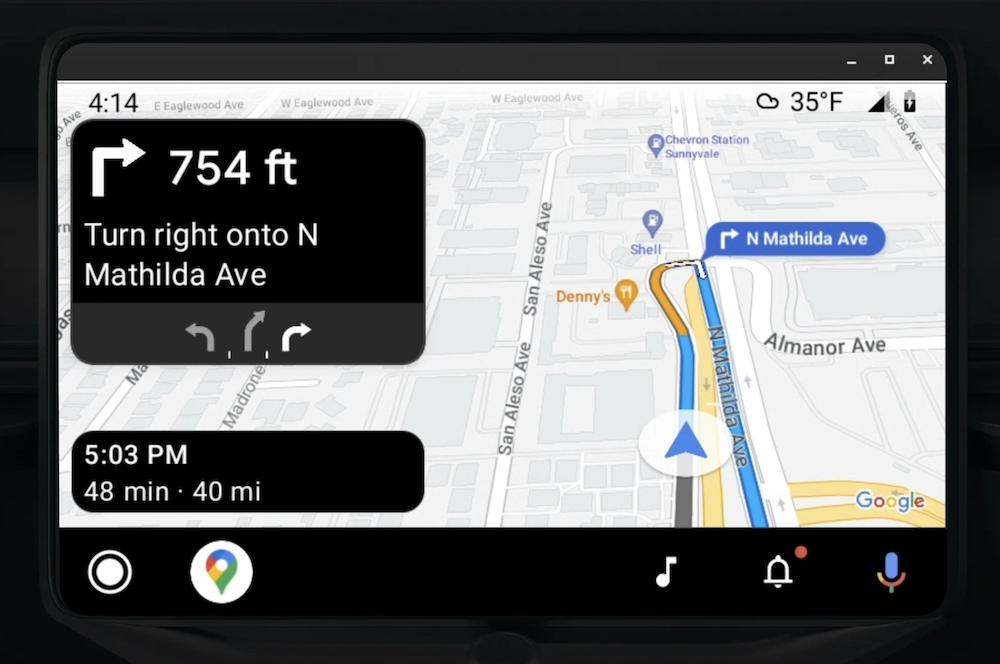
啟用 Navigation SDK 支援的應用程式,即可與 Android Auto 搭配使用,提供導航體驗的額外檢視畫面。這樣一來,手機和車用主機就能分別顯示地圖。兩個螢幕都會收到單例模式 Navigator.java 的指引。
系統會在資訊主頁中顯示安全核准的互動式元素,讓使用者安全地前往目的地,不會過度分心。使用者也可以與應用程式的特定功能互動,例如接受或拒絕訂單,或在地圖上查看顧客位置。訂單狀態更新資訊也會顯示在車內資訊主頁單元。
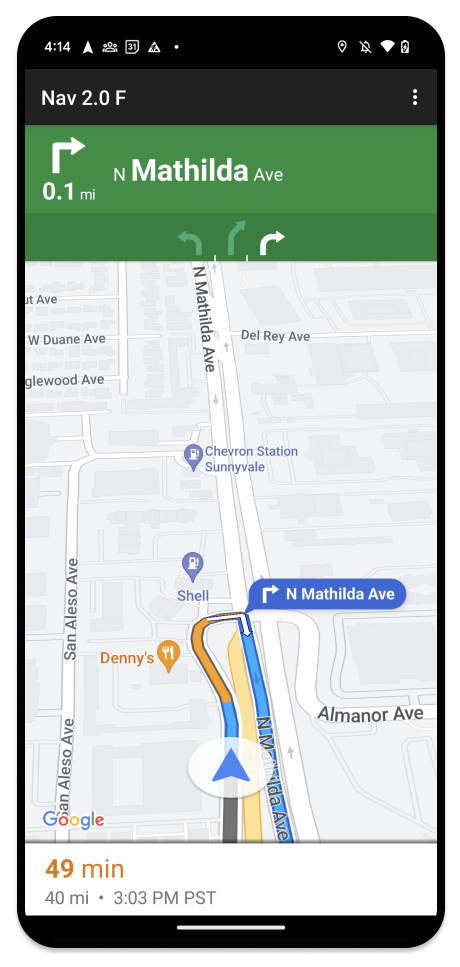
連接的手機可以繼續顯示標準的 Navigation SDK 體驗,或是應用程式中的任何其他檢視畫面或工作流程。這項功能可讓您繼續提供自訂功能,這些功能可能無法在車輛螢幕上正常運作。
設定
如要讓應用程式與 Android Auto 搭配運作,首先要使用 Android Auto 設定車輛服務,然後在 Navigation SDK 應用程式中啟用 TurnByTurn 程式庫。
開始使用 Android Auto
開始使用 Navigation SDK 功能 (專為 Android Auto 設計) 前,您必須為應用程式設定車輛服務,Android Auto 才能探索該服務。
請按照下列步驟操作,這些步驟都可以在 Android for Cars 開發人員文件找到:
- 熟悉 Android Auto 的基本功能。
- 安裝車輛專用 Android App Library。
- 設定應用程式的資訊清單檔案,加入 Android Auto。
- 在資訊清單中宣告最低車用應用程式層級為 1。
- 建立
CarAppService和工作階段。
設定 Navigation SDK
建立車輛應用程式服務後,即可開始使用 Navigation SDK。
- 如果尚未將 Navigation SDK 整合至應用程式,請先設定專案。
- 為應用程式啟用 Turn-by-Turn 指引動態消息。
- (選用步驟) 使用 Navigation SDK 產生的圖示。
- 使用
Screen類別提供的 Android Auto Surface 上的NavigationViewForAuto類別繪製地圖。 - 使用 TurnbyTurn 程式庫的資料填入 Android Auto 導航範本。
您已註冊服務,可為應用程式提供導覽資訊,且應用程式可以連線至 Android Auto,現在可以建立其餘導覽元素,讓應用程式與 Android Auto 正常運作:
繪製地圖和導覽使用者介面
NavigationViewForAuto 類別會在 Android Auto 畫面上算繪地圖和導航 UI。這項功能與手機的 NavigationView 功能大致相同,但互動性有限。使用 NavigationViewForAuto 在 Android Auto 提供的 Surface 上繪圖:
private boolean isSurfaceReady(SurfaceContainer surfaceContainer) {
return surfaceContainer.getSurface() != null
&& surfaceContainer.getDpi() != 0
&& surfaceContainer.getHeight() != 0
&& surfaceContainer.getWidth() != 0;
}
@Override
public void onSurfaceAvailable(@NonNull SurfaceContainer surfaceContainer) {
if (!isSurfaceReady(surfaceContainer)) {
return;
}
virtualDisplay =
getCarContext()
.getSystemService(DisplayManager.class)
.createVirtualDisplay(
VIRTUAL_DISPLAY_NAME,
surfaceContainer.getWidth(),
surfaceContainer.getHeight(),
surfaceContainer.getDpi(),
surfaceContainer.getSurface(),
DisplayManager.VIRTUAL_DISPLAY_FLAG_OWN_CONTENT_ONLY);
presentation = new Presentation(getCarContext(), virtualDisplay.getDisplay());
navigationView = new NavigationViewForAuto(getCarContext());
navigationView.onCreate(null);
navigationView.onStart();
navigationView.onResume();
presentation.setContentView(navigationView);
presentation.show();
navigationView.getMapAsync(googleMap -> this.googleMap = googleMap);
}
@Override
public void onSurfaceDestroyed(@NonNull SurfaceContainer surfaceContainer) {
navigationView.onPause();
navigationView.onStop();
navigationView.onDestroy();
presentation.dismiss();
virtualDisplay.release();
}
啟用地圖互動
為確保駕駛人安全,Android Auto 會限制螢幕介面互動,僅開放使用一系列 SurfaceCallback 方法。使用這些回呼,在車載螢幕上支援駕駛人與地圖的有限互動。舉例來說,onClick 和 onScale 分別對應使用者的「輕觸」和「雙指撥動」手勢。互動回呼必須使用地圖動作列,如下所示:
如要接收地圖互動回呼,應用程式必須使用 Action.PAN 按鈕。
如要支援其他使用者動作,請在地圖動作列中新增按鈕。
啟用介面回呼
@NonNull
@Override
public Template onGetTemplate() {
return new NavigationTemplate.Builder()
.setActionStrip(new ActionStrip.Builder().build())
.setMapActionStrip(new ActionStrip.Builder().addAction(Action.PAN).build())
.build();
}
雙指撥動即可縮放
@Override
public void onScale(float focusX, float focusY, float scaleFactor) {
CameraUpdate update =
CameraUpdateFactory.zoomBy((scaleFactor - 1),
new Point((int) focusX, (int) focusY));
googleMap.animateCamera(update); // map is set in onSurfaceAvailable.
}
平移
@Override
public void onScroll(float distanceX, float distanceY) {
googleMap.moveCamera(CameraUpdateFactory.scrollBy(distanceX, distanceY));
}
顯示導航路線
本節說明如何設定導覽貼文的觀察器,以及在轉彎資訊卡範本中填入導覽路線。
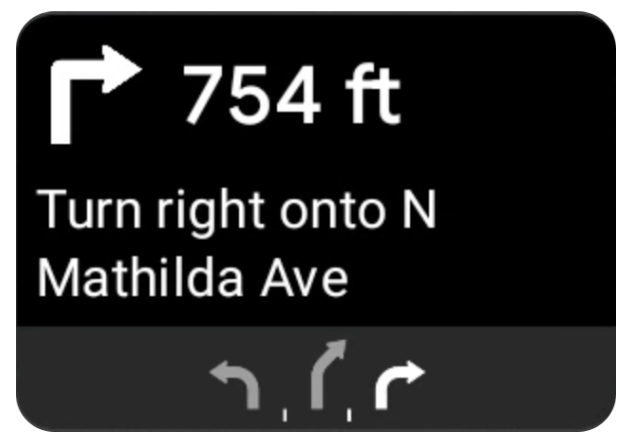
Android Auto 導覽範本會提供轉彎資訊卡,顯示目前行程的導覽資訊。Navigation SDK 中的 TurnByTurn 程式庫會提供這項導航資訊,您的程式碼會使用這項資訊填入 Android Auto 導航範本。
指南中的步驟操作,並註冊提供導航資訊的服務。設定觀察員
在下列範例中,SampleApplication 是維護 MutableLiveData<NavInfo> 物件的自訂應用程式類別。當觀察器收到導覽器物件的更新時,會將這個 NavInfo 物件發布至 SampleApplication 類別維護的 NavInfoMutableLiveData。
下列範例會在 Android Auto Screen 的實作中,為這個物件註冊觀察器。
public SampleAndroidAutoNavigationScreen(@NonNull CarContext carContext,
SampleApplication application) {
super(carContext);
getCarContext().getCarService(AppManager.class).setSurfaceCallback(this);
application.getNavInfoMutableLiveData().observe(this, this::processNextStep);
}
填入導航資訊
下列程式碼片段說明如何使用目前的路線資訊 (包括步驟、距離和圖示) 填入 Android Auto 範本。如要進一步瞭解這些顯示元素,請參閱「填入動態饋給顯示資料」。
展開可查看程式碼範例。
private RoutingInfo currentRoutingInfo; @NonNull @Override public Template onGetTemplate() { NavigationTemplate.Builder navigationTemplateBuilder = new NavigationTemplate.Builder() .setActionStrip(...) .setMapActionStrip(...) if (currentRoutingInfo != null) { navigationTemplateBuilder.setNavigationInfo(currentRoutingInfo); } return navigationTemplateBuilder.build(); } private void processNextStep(NavInfo navInfo) { if (navInfo == null || navinfo.getCurrentStep() == null) { return; } /** * Converts data received from the Navigation data feed * into Android-Auto compatible data structures. For more information * see the "Ensure correct maneuver types" below. */ Step currentStep = buildStepFromStepInfo(navInfo.getCurrentStep()); Distance distanceToStep = buildDistanceFromMeters(navInfo.getDistanceToCurrentStepMeters()); currentRoutingInfo = new RoutingInfo.Builder().setCurrentStep(currentStep, distanceToStep).build(); // Invalidate the current template which leads to another onGetTemplate call. invalidate(); } private Step buildStepFromStepInfo(StepInfo stepInfo) { IconCompat maneuverIcon = IconCompat.createWithBitmap(stepInfo.getManeuverBitmap()); Maneuver.Builder maneuverBuilder = newManeuver.Builder( ManeuverConverter .getAndroidAutoManeuverType(stepInfo.getManeuver())); CarIcon maneuverCarIcon = new CarIcon.Builder(maneuverIcon).build(); maneuverBuilder.setIcon(maneuverCarIcon); Step.Builder stepBuilder = new Step.Builder() .setRoad(stepInfo.getFullRoadName()) .setCue(stepInfo.getFullInstructionText()) .setManeuver(maneuverBuilder.build()); if (stepInfo.getLanes() != null && stepInfo.getLanesBitmap() != null) { for (Lane lane : buildAndroidAutoLanesFromStep(stepInfo)) { stepBuilder.addLane(lane); } IconCompat lanesIcon = IconCompat.createWithBitmap(stepInfo.getLanesBitmap()); CarIcon lanesImage = new CarIcon.Builder(lanesIcon).build(); stepBuilder.setLanesImage(lanesImage); } return stepBuilder.build(); } /* * Constructs a {@code Distance} object in imperial measurement units. * In a real world scenario, units would be based on locale. */ private Distance buildDistanceFromMeters(int distanceMeters) { // Distance can be negative so set the min distance to 0. int remainingFeet = (int) max(0, distanceMeters * DistanceConstants.FEET_PER_METER); double remainingMiles = ((double) remainingFeet) / DistanceConstants.FEET_PER_MILE; // Only use the tenths place digit if distance is less than 10 miles and show // feet if distance is less than 0.25 miles. if (remainingMiles >= DistanceConstants.MIN_MILES_TO_SHOW_INTEGER) { return Distance.create((int) round(remainingMiles), Distance.UNIT_MILES); } else if (remainingMiles >= 0.25) { return Distance.create((int) remainingMiles, Distance.UNIT_MILES); } else { return Distance.create(remainingFeet, Distance.UNIT_FEET); } }
確認機動類型是否正確
Android Auto Car 程式庫中使用的動作種類,與 TurnByTurn 程式庫提供的動作一一對應。不過,您必須將 Navigation SDK 動作轉換為 Android Auto Car 程式庫中的有效宣告。下表列出幾個欄位的對應項目,並提供範例轉換公用程式,方便您使用。
| Turn-by-Turn Library Maneuver | Android Auto Maneuver |
|---|---|
DEPART |
TYPE_DEPART |
DESTINATION |
TYPE_DESTINATION |
DESTINATION_LEFT |
TYPE_DESTINATION_LEFT |
DESTINATION_RIGHT |
TYPE_DESTINATION_RIGHT |
TURN_U_TURN_CLOCKWISE |
TYPE_U_TURN_RIGHT |
ON_RAMP_LEFT |
TYPE_ON_RAMP_NORMAL_LEFT |
ON_RAMP_RIGHT |
TYPE_ON_RAMP_NORMAL_RIGHT |
ON_RAMP_SLIGHT_LEFT |
TYPE_ON_RAMP_SLIGHT_LEFT |
FORK_RIGHT |
TYPE_FORK_RIGHT |
展開可查看程式碼範例。
import com.google.android.libraries.mapsplatform.turnbyturn.model.Maneuver; import com.google.common.collect.ImmutableMap; import javax.annotation.Nullable; /** Converter that converts between turn-by-turn and Android Auto Maneuvers. */ public final class ManeuverConverter { private ManeuverConverter() {} // Map from turn-by-turn Maneuver to Android Auto Maneuver.Type. private static final ImmutableMap<Integer, Integer> MANEUVER_TO_ANDROID_AUTO_MANEUVER_TYPE = ImmutableMap.<Integer, Integer>builder() .put(Maneuver.DEPART, androidx.car.app.navigation.model.Maneuver.TYPE_DEPART) .put(Maneuver.DESTINATION, androidx.car.app.navigation.model.Maneuver.TYPE_DESTINATION) .put( Maneuver.DESTINATION_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_DESTINATION_LEFT) .put( Maneuver.DESTINATION_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_DESTINATION_RIGHT) .put(Maneuver.STRAIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_STRAIGHT) .put(Maneuver.TURN_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_TURN_NORMAL_LEFT) .put( Maneuver.TURN_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_TURN_NORMAL_RIGHT) .put(Maneuver.TURN_KEEP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_KEEP_LEFT) .put(Maneuver.TURN_KEEP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_KEEP_RIGHT) .put( Maneuver.TURN_SLIGHT_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_TURN_SLIGHT_LEFT) .put( Maneuver.TURN_SLIGHT_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_TURN_SLIGHT_RIGHT) .put( Maneuver.TURN_SHARP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_TURN_SHARP_LEFT) .put( Maneuver.TURN_SHARP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_SHARP_RIGHT) .put( Maneuver.TURN_U_TURN_CLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_U_TURN_RIGHT) .put( Maneuver.TURN_U_TURN_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_U_TURN_LEFT) .put( Maneuver.MERGE_UNSPECIFIED, androidx.car.app.navigation.model.Maneuver.TYPE_MERGE_SIDE_UNSPECIFIED) .put(Maneuver.MERGE_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_MERGE_LEFT) .put(Maneuver.MERGE_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_MERGE_RIGHT) .put(Maneuver.FORK_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_FORK_LEFT) .put(Maneuver.FORK_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_FORK_RIGHT) .put( Maneuver.ON_RAMP_UNSPECIFIED, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_NORMAL_RIGHT) .put( Maneuver.ON_RAMP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_NORMAL_LEFT) .put( Maneuver.ON_RAMP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_NORMAL_RIGHT) .put( Maneuver.ON_RAMP_KEEP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_NORMAL_LEFT) .put( Maneuver.ON_RAMP_KEEP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_NORMAL_RIGHT) .put( Maneuver.ON_RAMP_SLIGHT_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_SLIGHT_LEFT) .put( Maneuver.ON_RAMP_SLIGHT_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_SLIGHT_RIGHT) .put( Maneuver.ON_RAMP_SHARP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_SHARP_LEFT) .put( Maneuver.ON_RAMP_SHARP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_SHARP_RIGHT) .put( Maneuver.ON_RAMP_U_TURN_CLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_U_TURN_RIGHT) .put( Maneuver.ON_RAMP_U_TURN_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_U_TURN_LEFT) .put( Maneuver.OFF_RAMP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_NORMAL_LEFT) .put( Maneuver.OFF_RAMP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_NORMAL_RIGHT) .put( Maneuver.OFF_RAMP_KEEP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_SLIGHT_LEFT) .put( Maneuver.OFF_RAMP_KEEP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_SLIGHT_RIGHT) .put( Maneuver.OFF_RAMP_SLIGHT_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_SLIGHT_LEFT) .put( Maneuver.OFF_RAMP_SLIGHT_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_SLIGHT_RIGHT) .put( Maneuver.OFF_RAMP_SHARP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_NORMAL_LEFT) .put( Maneuver.OFF_RAMP_SHARP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_NORMAL_RIGHT) .put( Maneuver.ROUNDABOUT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW) .put( Maneuver.ROUNDABOUT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW) .put( Maneuver.ROUNDABOUT_STRAIGHT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_ENTER_CW) .put( Maneuver.ROUNDABOUT_STRAIGHT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_ENTER_CCW) .put( Maneuver.ROUNDABOUT_LEFT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_LEFT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_RIGHT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_RIGHT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SLIGHT_LEFT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SLIGHT_LEFT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SLIGHT_RIGHT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SLIGHT_RIGHT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SHARP_LEFT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SHARP_LEFT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SHARP_RIGHT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SHARP_RIGHT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_U_TURN_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_U_TURN_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_EXIT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_EXIT_CW) .put( Maneuver.ROUNDABOUT_EXIT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_EXIT_CCW) .put(Maneuver.FERRY_BOAT, androidx.car.app.navigation.model.Maneuver.TYPE_FERRY_BOAT) .put(Maneuver.FERRY_TRAIN, androidx.car.app.navigation.model.Maneuver.TYPE_FERRY_TRAIN) .put(Maneuver.NAME_CHANGE, androidx.car.app.navigation.model.Maneuver.TYPE_NAME_CHANGE) .buildOrThrow(); /** Represents the roundabout turn angle for a slight turn in either right or left directions. */ private static final int ROUNDABOUT_ANGLE_SLIGHT = 10; /** Represents the roundabout turn angle for a normal turn in either right or left directions. */ private static final int ROUNDABOUT_ANGLE_NORMAL = 45; /** Represents the roundabout turn angle for a sharp turn in either right or left directions. */ private static final int ROUNDABOUT_ANGLE_SHARP = 135; /** Represents the roundabout turn angle for a u-turn in either right or left directions. */ private static final int ROUNDABOUT_ANGLE_U_TURN = 180; /** * Returns the corresponding {@link androidx.car.app.navigation.model.Maneuver.Type} for the given * direction {@link Maneuver} * * @throws {@link IllegalArgumentException} if the given maneuver does not have a corresponding * Android Auto Maneuver type. */ public static int getAndroidAutoManeuverType(@Maneuver int maneuver) { if (MANEUVER_TO_ANDROID_AUTO_MANEUVER_TYPE.containsKey(maneuver)) { return MANEUVER_TO_ANDROID_AUTO_MANEUVER_TYPE.get(maneuver); } throw new IllegalArgumentException( String.format( "Given turn-by-turn Maneuver %d cannot be converted to an Android Auto equivalent.", maneuver)); } /** * Returns the corresponding Android Auto roundabout angle for the given turn {@link Maneuver}. * Returns {@code null} if given maneuver does not involve a roundabout with a turn. */ @Nullable public static Integer getAndroidAutoRoundaboutAngle(@Maneuver int maneuver) { if (maneuver == Maneuver.ROUNDABOUT_LEFT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_RIGHT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_LEFT_COUNTERCLOCKWISE || maneuver == Maneuver.ROUNDABOUT_RIGHT_COUNTERCLOCKWISE) { return ROUNDABOUT_ANGLE_NORMAL; } if (maneuver == Maneuver.ROUNDABOUT_SHARP_LEFT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SHARP_RIGHT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SHARP_LEFT_COUNTERCLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SHARP_RIGHT_COUNTERCLOCKWISE) { return ROUNDABOUT_ANGLE_SHARP; } if (maneuver == Maneuver.ROUNDABOUT_SLIGHT_LEFT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SLIGHT_RIGHT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SLIGHT_LEFT_COUNTERCLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SLIGHT_RIGHT_COUNTERCLOCKWISE) { return ROUNDABOUT_ANGLE_SLIGHT; } if (maneuver == Maneuver.ROUNDABOUT_U_TURN_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_U_TURN_COUNTERCLOCKWISE) { return ROUNDABOUT_ANGLE_U_TURN; } return null; } }
相關說明文件
- 啟用逐步導航資訊動態饋給:先整合逐步導航功能,讓應用程式與 Android Auto 搭配運作。
- 填入動態消息顯示內容:存取指引資訊的資料欄位,並使用圖示。