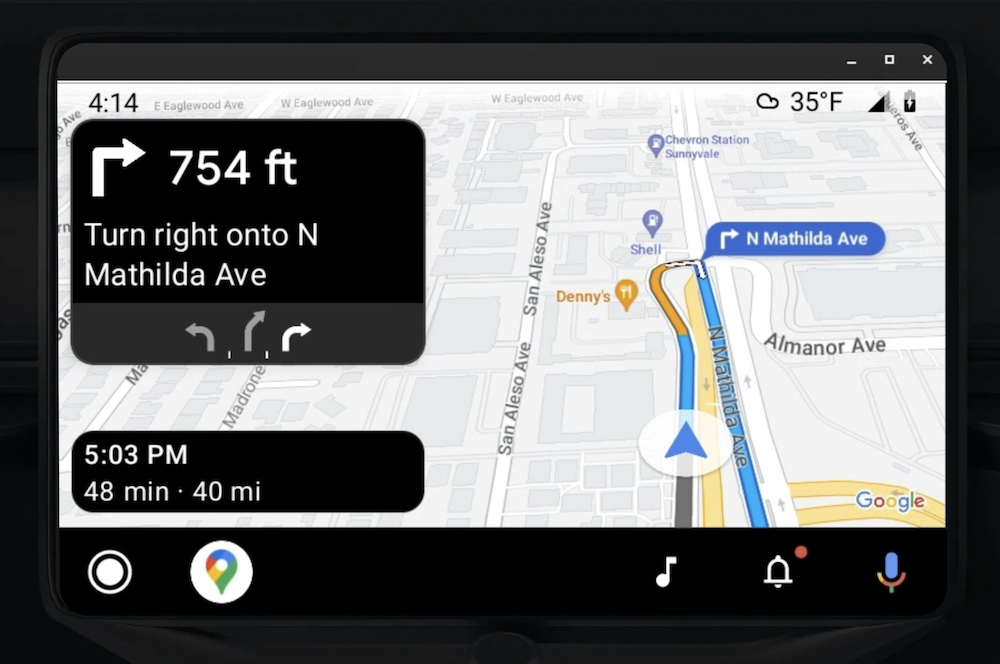
Bagian ini menjelaskan cara menggunakan Navigation SDK dengan library Aplikasi Android untuk Mobil guna menampilkan pengalaman navigasi aplikasi Anda di head unit dalam dasbor. Jika sistem dasbor pengguna mendukung Android Auto, pengguna dapat menggunakan aplikasi Anda langsung di layar mobil dengan menghubungkan ponsel ke unit. Panduan suara juga berjalan di speaker mobil.

Library Aplikasi Android untuk Mobil memungkinkan aplikasi Android berjalan di Android Auto dengan menyediakan serangkaian template visual yang disetujui untuk keselamatan pengemudi. Template ini sengaja membatasi kontrol UI dalam dasbor dari kontrol UI ponsel untuk mengurangi gangguan pengemudi.
Saat mengaktifkan aplikasi yang didukung Navigation SDK agar berfungsi dengan Android Auto, Anda menyediakan tampilan tambahan untuk pengalaman navigasi.
Hal ini memungkinkan dua tampilan peta—satu untuk ponsel dan satu untuk head unit. Kedua
tampilan menerima panduan dari Navigator.java, yang merupakan singleton.
Sistem dalam dasbor menampilkan elemen interaktif yang disetujui keamanannya sehingga pengguna dapat membuka tujuan dengan aman tanpa terganggu secara berlebihan. Pengguna juga dapat berinteraksi dengan fungsi khusus aplikasi Anda, seperti menerima atau menolak pesanan, atau melihat lokasi pelanggan di peta. Pembaruan status pesanan juga dapat muncul di unit dalam dasbor.
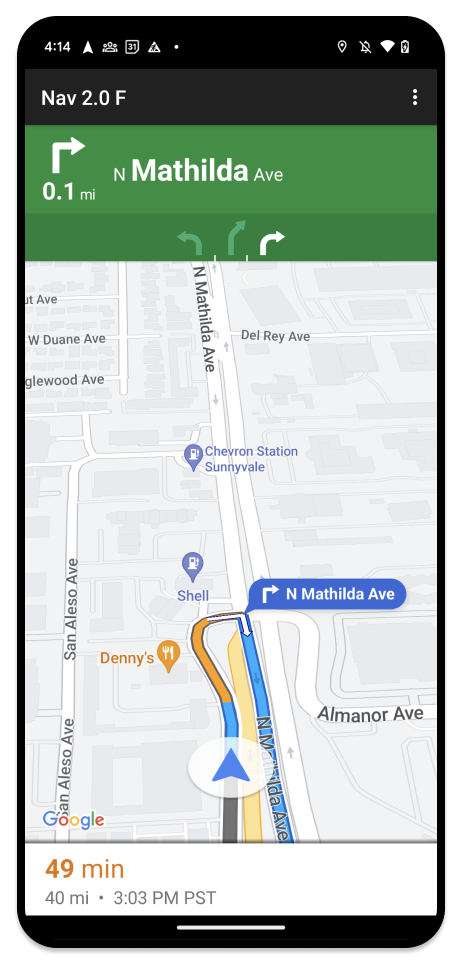
Ponsel yang terpasang dapat terus menampilkan pengalaman Navigation SDK standar atau tampilan atau alur kerja lainnya di aplikasi Anda. Fitur ini memungkinkan Anda terus menyediakan fungsi kustom yang mungkin tidak berfungsi dengan baik di layar mobil.
Siapkan
Bagian pertama agar aplikasi Anda berfungsi dengan Android Auto adalah menyiapkan layanan mobil dengan Android Auto, lalu mengaktifkan library TurnByTurn di aplikasi Navigation SDK Anda.
Mulai dengan Android Auto
Sebelum mulai menggunakan fitur Navigation SDK yang didesain untuk bekerja dengan Android Auto, Anda harus menyiapkan layanan mobil untuk aplikasi Anda agar Android Auto dapat menemukannya.
Ikuti langkah-langkah berikut, yang semuanya dapat ditemukan dalam dokumentasi developer Android untuk Mobil:
- Pahami fitur dasar Android Auto.
- Instal Library Aplikasi Android untuk Mobil.
- Konfigurasi file manifes aplikasi Anda untuk menyertakan Android Auto.
- Deklarasikan level aplikasi mobil minimum 1 di manifes Anda.
- Buat
CarAppServicedan sesi Anda.
Menyiapkan Navigation SDK
Setelah membuat layanan aplikasi mobil, Anda siap menggunakan Navigation SDK.
- Siapkan project Anda, jika Anda belum mengintegrasikan Navigation SDK ke dalam aplikasi.
- Aktifkan feed panduan TurnbyTurn untuk aplikasi Anda.
- Opsional. Gunakan ikon yang dibuat dari Navigation SDK.
- Gambarkan peta
menggunakan class
NavigationViewForAutodi Surface Android Auto yang disediakan di classScreen. - Isi template Navigasi Android Auto dengan data dari library TurnbyTurn.
Setelah layanan terdaftar untuk memberikan informasi navigasi ke aplikasi Anda dan aplikasi Anda dapat terhubung ke Android Auto, Anda siap membuat elemen navigasi lainnya yang diperlukan agar aplikasi Anda berfungsi dengan baik di Android Auto:
- Menggambar peta dan UI navigasi
- Mengaktifkan interaksi peta
- Menampilkan rute navigasi
- Memastikan jenis manuver yang benar
Menggambar UI peta dan navigasi
Class NavigationViewForAuto merender peta dan UI navigasi di layar Android
Auto. Fitur ini menyediakan sebagian besar fungsi yang sama seperti NavigationView
untuk ponsel, tetapi dengan interaktivitas terbatas. Gunakan NavigationViewForAuto untuk menggambar di Surface yang disediakan oleh Android Auto:
private boolean isSurfaceReady(SurfaceContainer surfaceContainer) {
return surfaceContainer.getSurface() != null
&& surfaceContainer.getDpi() != 0
&& surfaceContainer.getHeight() != 0
&& surfaceContainer.getWidth() != 0;
}
@Override
public void onSurfaceAvailable(@NonNull SurfaceContainer surfaceContainer) {
if (!isSurfaceReady(surfaceContainer)) {
return;
}
virtualDisplay =
getCarContext()
.getSystemService(DisplayManager.class)
.createVirtualDisplay(
VIRTUAL_DISPLAY_NAME,
surfaceContainer.getWidth(),
surfaceContainer.getHeight(),
surfaceContainer.getDpi(),
surfaceContainer.getSurface(),
DisplayManager.VIRTUAL_DISPLAY_FLAG_OWN_CONTENT_ONLY);
presentation = new Presentation(getCarContext(), virtualDisplay.getDisplay());
navigationView = new NavigationViewForAuto(getCarContext());
navigationView.onCreate(null);
navigationView.onStart();
navigationView.onResume();
presentation.setContentView(navigationView);
presentation.show();
navigationView.getMapAsync(googleMap -> this.googleMap = googleMap);
}
@Override
public void onSurfaceDestroyed(@NonNull SurfaceContainer surfaceContainer) {
navigationView.onPause();
navigationView.onStop();
navigationView.onDestroy();
presentation.dismiss();
virtualDisplay.release();
}
Mengaktifkan interaksi peta
Untuk keselamatan pengemudi, Android Auto membatasi interaksi permukaan layar ke serangkaian metode SurfaceCallback. Gunakan callback ini untuk mendukung interaksi pengemudi yang terbatas dengan peta di layar dalam dasbor. Misalnya, onClick dan onScale sesuai dengan gestur ketuk
dan mencubit dari pengguna. Callback interaktivitas harus menggunakan strip
tindakan
peta
sebagai berikut:
Untuk menerima callback interaktivitas peta, aplikasi Anda harus menggunakan tombol Action.PAN.
Untuk mendukung tindakan pengguna tambahan, tambahkan tombol ke strip tindakan peta.
Mengaktifkan callback platform
@NonNull
@Override
public Template onGetTemplate() {
return new NavigationTemplate.Builder()
.setActionStrip(new ActionStrip.Builder().build())
.setMapActionStrip(new ActionStrip.Builder().addAction(Action.PAN).build())
.build();
}
Zoom dengan mencubit
@Override
public void onScale(float focusX, float focusY, float scaleFactor) {
CameraUpdate update =
CameraUpdateFactory.zoomBy((scaleFactor - 1),
new Point((int) focusX, (int) focusY));
googleMap.animateCamera(update); // map is set in onSurfaceAvailable.
}
Menggeser
@Override
public void onScroll(float distanceX, float distanceY) {
googleMap.moveCamera(CameraUpdateFactory.scrollBy(distanceX, distanceY));
}
Menampilkan rute navigasi
Bagian ini membahas cara menyiapkan pengamat untuk postingan navigasi dan cara mengisi petunjuk navigasi dalam template kartu belokan.
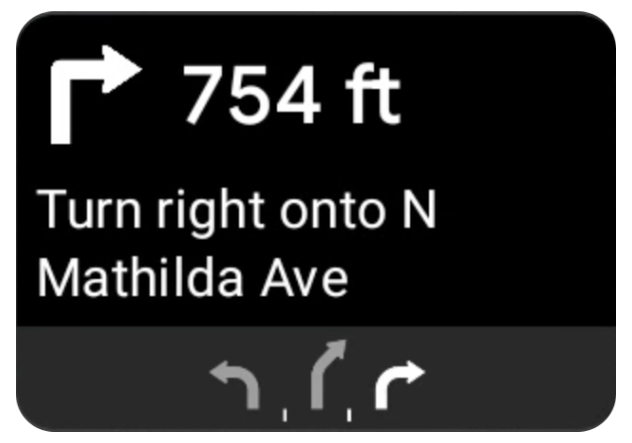
Template Navigasi Android Auto menyediakan kartu belokan yang menampilkan informasi navigasi terkait perjalanan saat ini. Library TurnByTurn di Navigation SDK menyediakan informasi navigasi ini, yang digunakan kode Anda untuk mengisi template navigasi Android Auto.
Menyiapkan pengamat
Dalam contoh berikut, SampleApplication adalah class aplikasi kustom yang
mempertahankan objek MutableLiveData<NavInfo>. Saat menerima update dari objek navigator, observer memposting objek NavInfo ini ke NavInfoMutableLiveData yang dikelola oleh class SampleApplication.
Contoh berikut mendaftarkan pengamat untuk objek ini dalam penerapannya di Layar Android Auto.
public SampleAndroidAutoNavigationScreen(@NonNull CarContext carContext,
SampleApplication application) {
super(carContext);
getCarContext().getCarService(AppManager.class).setSurfaceCallback(this);
application.getNavInfoMutableLiveData().observe(this, this::processNextStep);
}
Mengisi informasi navigasi
Cuplikan kode berikut menunjukkan cara mengisi template Android Auto dengan informasi perutean saat ini, termasuk langkah-langkah, jarak, dan ikon. Anda dapat membaca lebih lanjut elemen tampilan ini di Mengisi tampilan feed.
Luaskan untuk melihat contoh kode.
private RoutingInfo currentRoutingInfo; @NonNull @Override public Template onGetTemplate() { NavigationTemplate.Builder navigationTemplateBuilder = new NavigationTemplate.Builder() .setActionStrip(...) .setMapActionStrip(...) if (currentRoutingInfo != null) { navigationTemplateBuilder.setNavigationInfo(currentRoutingInfo); } return navigationTemplateBuilder.build(); } private void processNextStep(NavInfo navInfo) { if (navInfo == null || navinfo.getCurrentStep() == null) { return; } /** * Converts data received from the Navigation data feed * into Android-Auto compatible data structures. For more information * see the "Ensure correct maneuver types" below. */ Step currentStep = buildStepFromStepInfo(navInfo.getCurrentStep()); Distance distanceToStep = buildDistanceFromMeters(navInfo.getDistanceToCurrentStepMeters()); currentRoutingInfo = new RoutingInfo.Builder().setCurrentStep(currentStep, distanceToStep).build(); // Invalidate the current template which leads to another onGetTemplate call. invalidate(); } private Step buildStepFromStepInfo(StepInfo stepInfo) { IconCompat maneuverIcon = IconCompat.createWithBitmap(stepInfo.getManeuverBitmap()); Maneuver.Builder maneuverBuilder = newManeuver.Builder( ManeuverConverter .getAndroidAutoManeuverType(stepInfo.getManeuver())); CarIcon maneuverCarIcon = new CarIcon.Builder(maneuverIcon).build(); maneuverBuilder.setIcon(maneuverCarIcon); Step.Builder stepBuilder = new Step.Builder() .setRoad(stepInfo.getFullRoadName()) .setCue(stepInfo.getFullInstructionText()) .setManeuver(maneuverBuilder.build()); if (stepInfo.getLanes() != null && stepInfo.getLanesBitmap() != null) { for (Lane lane : buildAndroidAutoLanesFromStep(stepInfo)) { stepBuilder.addLane(lane); } IconCompat lanesIcon = IconCompat.createWithBitmap(stepInfo.getLanesBitmap()); CarIcon lanesImage = new CarIcon.Builder(lanesIcon).build(); stepBuilder.setLanesImage(lanesImage); } return stepBuilder.build(); } /* * Constructs a {@code Distance} object in imperial measurement units. * In a real world scenario, units would be based on locale. */ private Distance buildDistanceFromMeters(int distanceMeters) { // Distance can be negative so set the min distance to 0. int remainingFeet = (int) max(0, distanceMeters * DistanceConstants.FEET_PER_METER); double remainingMiles = ((double) remainingFeet) / DistanceConstants.FEET_PER_MILE; // Only use the tenths place digit if distance is less than 10 miles and show // feet if distance is less than 0.25 miles. if (remainingMiles >= DistanceConstants.MIN_MILES_TO_SHOW_INTEGER) { return Distance.create((int) round(remainingMiles), Distance.UNIT_MILES); } else if (remainingMiles >= 0.25) { return Distance.create((int) remainingMiles, Distance.UNIT_MILES); } else { return Distance.create(remainingFeet, Distance.UNIT_FEET); } }
Memverifikasi jenis manuver yang benar
Jenis manuver yang digunakan di library Mobil Android Auto sesuai satu-ke-satu dengan manuver yang disediakan oleh library TurnByTurn. Namun, Anda harus mengonversi manuver Navigation SDK menjadi deklarasi yang valid di library Mobil Android Auto. Tabel berikut menunjukkan korespondensi untuk beberapa kolom, diikuti dengan contoh utilitas konverter untuk memudahkan Anda.
| Manuver Belokan demi Belokan di Perpustakaan | Manuver Android Auto |
|---|---|
DEPART |
TYPE_DEPART |
DESTINATION |
TYPE_DESTINATION |
DESTINATION_LEFT |
TYPE_DESTINATION_LEFT |
DESTINATION_RIGHT |
TYPE_DESTINATION_RIGHT |
TURN_U_TURN_CLOCKWISE |
TYPE_U_TURN_RIGHT |
ON_RAMP_LEFT |
TYPE_ON_RAMP_NORMAL_LEFT |
ON_RAMP_RIGHT |
TYPE_ON_RAMP_NORMAL_RIGHT |
ON_RAMP_SLIGHT_LEFT |
TYPE_ON_RAMP_SLIGHT_LEFT |
FORK_RIGHT |
TYPE_FORK_RIGHT |
Luaskan untuk melihat contoh kode.
import com.google.android.libraries.mapsplatform.turnbyturn.model.Maneuver; import com.google.common.collect.ImmutableMap; import javax.annotation.Nullable; /** Converter that converts between turn-by-turn and Android Auto Maneuvers. */ public final class ManeuverConverter { private ManeuverConverter() {} // Map from turn-by-turn Maneuver to Android Auto Maneuver.Type. private static final ImmutableMap<Integer, Integer> MANEUVER_TO_ANDROID_AUTO_MANEUVER_TYPE = ImmutableMap.<Integer, Integer>builder() .put(Maneuver.DEPART, androidx.car.app.navigation.model.Maneuver.TYPE_DEPART) .put(Maneuver.DESTINATION, androidx.car.app.navigation.model.Maneuver.TYPE_DESTINATION) .put( Maneuver.DESTINATION_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_DESTINATION_LEFT) .put( Maneuver.DESTINATION_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_DESTINATION_RIGHT) .put(Maneuver.STRAIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_STRAIGHT) .put(Maneuver.TURN_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_TURN_NORMAL_LEFT) .put( Maneuver.TURN_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_TURN_NORMAL_RIGHT) .put(Maneuver.TURN_KEEP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_KEEP_LEFT) .put(Maneuver.TURN_KEEP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_KEEP_RIGHT) .put( Maneuver.TURN_SLIGHT_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_TURN_SLIGHT_LEFT) .put( Maneuver.TURN_SLIGHT_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_TURN_SLIGHT_RIGHT) .put( Maneuver.TURN_SHARP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_TURN_SHARP_LEFT) .put( Maneuver.TURN_SHARP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_SHARP_RIGHT) .put( Maneuver.TURN_U_TURN_CLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_U_TURN_RIGHT) .put( Maneuver.TURN_U_TURN_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_U_TURN_LEFT) .put( Maneuver.MERGE_UNSPECIFIED, androidx.car.app.navigation.model.Maneuver.TYPE_MERGE_SIDE_UNSPECIFIED) .put(Maneuver.MERGE_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_MERGE_LEFT) .put(Maneuver.MERGE_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_MERGE_RIGHT) .put(Maneuver.FORK_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_FORK_LEFT) .put(Maneuver.FORK_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_FORK_RIGHT) .put( Maneuver.ON_RAMP_UNSPECIFIED, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_NORMAL_RIGHT) .put( Maneuver.ON_RAMP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_NORMAL_LEFT) .put( Maneuver.ON_RAMP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_NORMAL_RIGHT) .put( Maneuver.ON_RAMP_KEEP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_NORMAL_LEFT) .put( Maneuver.ON_RAMP_KEEP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_NORMAL_RIGHT) .put( Maneuver.ON_RAMP_SLIGHT_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_SLIGHT_LEFT) .put( Maneuver.ON_RAMP_SLIGHT_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_SLIGHT_RIGHT) .put( Maneuver.ON_RAMP_SHARP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_SHARP_LEFT) .put( Maneuver.ON_RAMP_SHARP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_SHARP_RIGHT) .put( Maneuver.ON_RAMP_U_TURN_CLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_U_TURN_RIGHT) .put( Maneuver.ON_RAMP_U_TURN_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_U_TURN_LEFT) .put( Maneuver.OFF_RAMP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_NORMAL_LEFT) .put( Maneuver.OFF_RAMP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_NORMAL_RIGHT) .put( Maneuver.OFF_RAMP_KEEP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_SLIGHT_LEFT) .put( Maneuver.OFF_RAMP_KEEP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_SLIGHT_RIGHT) .put( Maneuver.OFF_RAMP_SLIGHT_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_SLIGHT_LEFT) .put( Maneuver.OFF_RAMP_SLIGHT_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_SLIGHT_RIGHT) .put( Maneuver.OFF_RAMP_SHARP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_NORMAL_LEFT) .put( Maneuver.OFF_RAMP_SHARP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_NORMAL_RIGHT) .put( Maneuver.ROUNDABOUT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW) .put( Maneuver.ROUNDABOUT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW) .put( Maneuver.ROUNDABOUT_STRAIGHT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_ENTER_CW) .put( Maneuver.ROUNDABOUT_STRAIGHT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_ENTER_CCW) .put( Maneuver.ROUNDABOUT_LEFT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_LEFT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_RIGHT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_RIGHT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SLIGHT_LEFT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SLIGHT_LEFT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SLIGHT_RIGHT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SLIGHT_RIGHT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SHARP_LEFT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SHARP_LEFT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SHARP_RIGHT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SHARP_RIGHT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_U_TURN_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_U_TURN_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_EXIT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_EXIT_CW) .put( Maneuver.ROUNDABOUT_EXIT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_EXIT_CCW) .put(Maneuver.FERRY_BOAT, androidx.car.app.navigation.model.Maneuver.TYPE_FERRY_BOAT) .put(Maneuver.FERRY_TRAIN, androidx.car.app.navigation.model.Maneuver.TYPE_FERRY_TRAIN) .put(Maneuver.NAME_CHANGE, androidx.car.app.navigation.model.Maneuver.TYPE_NAME_CHANGE) .buildOrThrow(); /** Represents the roundabout turn angle for a slight turn in either right or left directions. */ private static final int ROUNDABOUT_ANGLE_SLIGHT = 10; /** Represents the roundabout turn angle for a normal turn in either right or left directions. */ private static final int ROUNDABOUT_ANGLE_NORMAL = 45; /** Represents the roundabout turn angle for a sharp turn in either right or left directions. */ private static final int ROUNDABOUT_ANGLE_SHARP = 135; /** Represents the roundabout turn angle for a u-turn in either right or left directions. */ private static final int ROUNDABOUT_ANGLE_U_TURN = 180; /** * Returns the corresponding {@link androidx.car.app.navigation.model.Maneuver.Type} for the given * direction {@link Maneuver} * * @throws {@link IllegalArgumentException} if the given maneuver does not have a corresponding * Android Auto Maneuver type. */ public static int getAndroidAutoManeuverType(@Maneuver int maneuver) { if (MANEUVER_TO_ANDROID_AUTO_MANEUVER_TYPE.containsKey(maneuver)) { return MANEUVER_TO_ANDROID_AUTO_MANEUVER_TYPE.get(maneuver); } throw new IllegalArgumentException( String.format( "Given turn-by-turn Maneuver %d cannot be converted to an Android Auto equivalent.", maneuver)); } /** * Returns the corresponding Android Auto roundabout angle for the given turn {@link Maneuver}. * Returns {@code null} if given maneuver does not involve a roundabout with a turn. */ @Nullable public static Integer getAndroidAutoRoundaboutAngle(@Maneuver int maneuver) { if (maneuver == Maneuver.ROUNDABOUT_LEFT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_RIGHT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_LEFT_COUNTERCLOCKWISE || maneuver == Maneuver.ROUNDABOUT_RIGHT_COUNTERCLOCKWISE) { return ROUNDABOUT_ANGLE_NORMAL; } if (maneuver == Maneuver.ROUNDABOUT_SHARP_LEFT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SHARP_RIGHT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SHARP_LEFT_COUNTERCLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SHARP_RIGHT_COUNTERCLOCKWISE) { return ROUNDABOUT_ANGLE_SHARP; } if (maneuver == Maneuver.ROUNDABOUT_SLIGHT_LEFT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SLIGHT_RIGHT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SLIGHT_LEFT_COUNTERCLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SLIGHT_RIGHT_COUNTERCLOCKWISE) { return ROUNDABOUT_ANGLE_SLIGHT; } if (maneuver == Maneuver.ROUNDABOUT_U_TURN_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_U_TURN_COUNTERCLOCKWISE) { return ROUNDABOUT_ANGLE_U_TURN; } return null; } }
Dokumentasi terkait
- Aktifkan feed panduan belokan demi belokan: Integrasikan fungsi belokan demi belokan terlebih dahulu agar aplikasi Anda dapat berfungsi dengan Android Auto.
- Mengisi tampilan feed: Akses kolom data untuk info panduan dan gunakan ikon.