- Disponibilidad del conjunto de datos
- 2015-06-27T00:00:00Z–2026-05-03T09:47:56.520000Z
- Proveedor del conjunto de datos
- World Resources Institute Google
- Etiquetas
Descripción
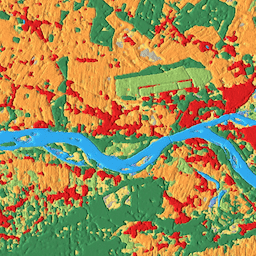
Dynamic World es un conjunto de datos de cobertura y uso del suelo (LULC) de 10 m casi en tiempo real (NRT) que incluye probabilidades de clase y la información de etiquetas para nueve clases.
Las predicciones de Dynamic World están disponibles para la colección Sentinel-2 L1C desde el 27/06/2015 hasta la actualidad. La frecuencia de revisita de Sentinel-2 es de entre 2 y 5 días, según la latitud. Las predicciones de Dynamic World se generan para imágenes Sentinel-2 L1C con CLOUDY_PIXEL_PERCENTAGE <= 35%. Las predicciones se enmascaran para quitar las nubes y las sombras de las nubes con una combinación de probabilidad de nubes S2, índice de desplazamiento de nubes y transformación de distancia direccional.
Las imágenes de la colección Dynamic World tienen nombres que coinciden con los nombres de los recursos individuales de Sentinel-2 L1C de los que se derivaron, por ejemplo:
ee.Image('COPERNICUS/S2/20160711T084022_20160711T084751_T35PKT')
tiene una imagen de Dynamic World coincidente llamada: ee.Image('GOOGLE/DYNAMICWORLD/V1/20160711T084022_20160711T084751_T35PKT').
Todas las bandas de probabilidad, excepto la banda "label", suman 1 en conjunto.
Para obtener más información sobre el conjunto de datos de Dynamic World y ver ejemplos para generar composiciones, calcular estadísticas regionales y trabajar con las series temporales, consulta la serie de instructivos Introducción a Dynamic World.
Dado que las estimaciones de clase de Dynamic World se derivan de imágenes individuales con un contexto espacial de una pequeña ventana móvil, las "probabilidades" principales para las coberturas terrestres predichas que se definen en parte por la cobertura a lo largo del tiempo, como los cultivos, pueden ser comparativamente bajas en ausencia de características distintivas obvias. Las superficies de alto rendimiento en climas áridos, la arena, el reflejo solar, etc., también pueden mostrar este fenómeno.
Para seleccionar solo los píxeles que pertenecen con confianza a una clase de Dynamic World, se recomienda enmascarar los resultados de Dynamic World estableciendo un umbral para la "probabilidad" estimada de la predicción principal.
Bandas
Bandas
Tamaño de los píxeles: 10 metros (todas las bandas)
| Nombre | Mín. | Máx. | Tamaño de los píxeles | Descripción |
|---|---|---|---|---|
water |
0 | 1 | 10 metros | Probabilidad estimada de cobertura completa por agua |
trees |
0 | 1 | 10 metros | Probabilidad estimada de cobertura completa por árboles |
grass |
0 | 1 | 10 metros | Probabilidad estimada de cobertura completa por césped |
flooded_vegetation |
0 | 1 | 10 metros | Probabilidad estimada de cobertura completa por vegetación inundada |
crops |
0 | 1 | 10 metros | Probabilidad estimada de cobertura completa por cultivos |
shrub_and_scrub |
0 | 1 | 10 metros | Probabilidad estimada de cobertura completa por arbustos y matorrales |
built |
0 | 1 | 10 metros | Probabilidad estimada de cobertura completa por áreas construidas |
bare |
0 | 1 | 10 metros | Probabilidad estimada de cobertura completa por áreas descubiertas |
snow_and_ice |
0 | 1 | 10 metros | Probabilidad estimada de cobertura completa por nieve y hielo |
label |
0 | 8 | 10 metros | Índice de la banda con la probabilidad estimada más alta |
Tabla de clases de etiquetas
| Valor | Color | Descripción |
|---|---|---|
| 0 | #419bdf | agua |
| 1 | #397d49 | árboles |
| 2 | #88b053 | césped |
| 3 | #7a87c6 | flooded_vegetation |
| 4 | #e49635 | cultivos |
| 5 | #dfc35a | shrub_and_scrub |
| 6 | #c4281b | áreas construidas |
| 7 | #a59b8f | áreas descubiertas |
| 8 | #b39fe1 | snow_and_ice |
Propiedades de la imagen
Propiedades de la imagen
| Nombre | Tipo | Descripción |
|---|---|---|
| dynamicworld_algorithm_version | STRING | La cadena de versión identifica de forma única el modelo de Dynamic World y el proceso de inferencia que se usó para producir la imagen. |
| qa_algorithm_version | STRING | La cadena de versión identifica de forma única el proceso de enmascaramiento de nubes que se usó para producir la imagen. |
Condiciones de Uso
Condiciones de Uso
Este conjunto de datos se otorga bajo la licencia CC-BY 4.0 y requiere la siguiente atribución: "Google produce este conjunto de datos para el proyecto Dynamic World en asociación con la National Geographic Society y el World Resources Institute".
Contiene datos modificados de Copernicus Sentinel [2015-presente]. Consulta el Aviso legal de datos de Sentinel.
Citas
Brown, C.F., Brumby, S.P., Guzder-Williams, B. et al. Dynamic World, Near real-time global 10 m land use land cover mapping. Sci Data 9, 251 (2022). doi:10.1038/s41597-022-01307-4
DOIs
Explora con Earth Engine
Editor de código (JavaScript)
// Construct a collection of corresponding Dynamic World and Sentinel-2 for // inspection. Filter by region and date. var START = ee.Date('2021-04-02'); var END = START.advance(1, 'day'); var colFilter = ee.Filter.and( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END)); var dwCol = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(colFilter); var s2Col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); // Link DW and S2 source images. var linkedCol = dwCol.linkCollection(s2Col, s2Col.first().bandNames()); // Get example DW image with linked S2 image. var linkedImg = ee.Image(linkedCol.first()); // Create a visualization that blends DW class label with probability. // Define list pairs of DW LULC label and color. var CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice']; var VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1']; // Create an RGB image of the label (most likely class) on [0, 1]. var dwRgb = linkedImg .select('label') .visualize({min: 0, max: 8, palette: VIS_PALETTE}) .divide(255); // Get the most likely class probability. var top1Prob = linkedImg.select(CLASS_NAMES).reduce(ee.Reducer.max()); // Create a hillshade of the most likely class probability on [0, 1]; var top1ProbHillshade = ee.Terrain.hillshade(top1Prob.multiply(100)) .divide(255); // Combine the RGB image with the hillshade. var dwRgbHillshade = dwRgb.multiply(top1ProbHillshade); // Display the Dynamic World visualization with the source Sentinel-2 image. Map.setCenter(20.6729, 52.4305, 12); Map.addLayer( linkedImg, {min: 0, max: 3000, bands: ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C'); Map.addLayer( dwRgbHillshade, {min: 0, max: 0.65}, 'Dynamic World V1 - label hillshade');
import ee import geemap.core as geemap
Colab (Python)
# Construct a collection of corresponding Dynamic World and Sentinel-2 for # inspection. Filter by region and date. START = ee.Date('2021-04-02') END = START.advance(1, 'day') col_filter = ee.Filter.And( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END), ) dw_col = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(col_filter) s2_col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); # Link DW and S2 source images. linked_col = dw_col.linkCollection(s2_col, s2_col.first().bandNames()); # Get example DW image with linked S2 image. linked_image = ee.Image(linked_col.first()) # Create a visualization that blends DW class label with probability. # Define list pairs of DW LULC label and color. CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice', ] VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1', ] # Create an RGB image of the label (most likely class) on [0, 1]. dw_rgb = ( linked_image.select('label') .visualize(min=0, max=8, palette=VIS_PALETTE) .divide(255) ) # Get the most likely class probability. top1_prob = linked_image.select(CLASS_NAMES).reduce(ee.Reducer.max()) # Create a hillshade of the most likely class probability on [0, 1] top1_prob_hillshade = ee.Terrain.hillshade(top1_prob.multiply(100)).divide(255) # Combine the RGB image with the hillshade. dw_rgb_hillshade = dw_rgb.multiply(top1_prob_hillshade) # Display the Dynamic World visualization with the source Sentinel-2 image. m = geemap.Map() m.set_center(20.6729, 52.4305, 12) m.add_layer( linked_image, {'min': 0, 'max': 3000, 'bands': ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C', ) m.add_layer( dw_rgb_hillshade, {'min': 0, 'max': 0.65}, 'Dynamic World V1 - label hillshade', ) m