- Disponibilidade do conjunto de dados
- 2015-06-27T00:00:00Z–2026-05-04T01:14:01.633000Z
- Produtor de dados
- World Resources Institute Google
- Tags
Descrição
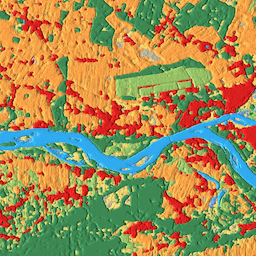
O Dynamic World é um conjunto de dados de uso/cobertura da terra (LULC, na sigla em inglês) quase em tempo real (NRT) de 10 m que inclui probabilidades de classe e informações de rótulo para nove classes.
As previsões do Dynamic World estão disponíveis para a coleção L1C do Sentinel-2 de 27/06/2015 até o momento. A frequência de revisita do Sentinel-2 é de 2 a 5 dias, dependendo da latitude. As previsões do Dynamic World são geradas para imagens L1C do Sentinel-2 com CLOUDY_PIXEL_PERCENTAGE <= 35%. As previsões são mascaradas para remover nuvens e sombras de nuvens usando uma combinação de probabilidade de nuvem S2, índice de deslocamento de nuvem e transformação de distância direcional.
As imagens na coleção do Dynamic World têm nomes que correspondem aos nomes de recursos L1C individuais do Sentinel-2 de que foram derivadas, por exemplo:
ee.Image('COPERNICUS/S2/20160711T084022_20160711T084751_T35PKT')
tem uma imagem correspondente do Dynamic World chamada: ee.Image('GOOGLE/DYNAMICWORLD/V1/20160711T084022_20160711T084751_T35PKT').
Todas as bandas de probabilidade, exceto a "rótulo", somam 1.
Para saber mais sobre o conjunto de dados do Dynamic World e conferir exemplos de geração de composições, cálculo de estatísticas regionais e trabalho com as séries temporais, consulte a série de tutoriais Introdução ao Dynamic World.
Como as estimativas de classe do Dynamic World são derivadas de imagens únicas usando um contexto espacial de uma pequena janela móvel, as "probabilidades" principais para coberturas de terra previstas que são definidas em parte pela cobertura ao longo do tempo, como plantações, podem ser comparativamente baixas na ausência de recursos distintivos óbvios. Superfícies de alto retorno em climas áridos, areia, brilho solar etc. também podem apresentar esse fenômeno.
Para selecionar apenas pixels que pertencem com confiança a uma classe do Dynamic World, recomendamos mascarar as saídas do Dynamic World definindo um limite para a "probabilidade" estimada da previsão principal.
Bandas
Bandas
Tamanho do pixel: 10 metros (todas as bandas)
| Nome | Mín. | Máx. | Tamanho do pixel | Descrição |
|---|---|---|---|---|
water |
0 | 1 | 10 metros | Probabilidade estimada de cobertura completa pela água |
trees |
0 | 1 | 10 metros | Probabilidade estimada de cobertura completa por árvores |
grass |
0 | 1 | 10 metros | Probabilidade estimada de cobertura completa por grama |
flooded_vegetation |
0 | 1 | 10 metros | Probabilidade estimada de cobertura completa por vegetação inundada |
crops |
0 | 1 | 10 metros | Probabilidade estimada de cobertura completa por plantações |
shrub_and_scrub |
0 | 1 | 10 metros | Probabilidade estimada de cobertura completa por arbustos e matagais |
built |
0 | 1 | 10 metros | Probabilidade estimada de cobertura completa por criados |
bare |
0 | 1 | 10 metros | Probabilidade estimada de cobertura completa por solo sem vegetação |
snow_and_ice |
0 | 1 | 10 metros | Probabilidade estimada de cobertura completa por neve e gelo |
label |
0 | 8 | 10 metros | Índice da banda com a maior probabilidade estimada |
Tabela de classes de rótulo
| Valor | Cor | Descrição |
|---|---|---|
| 0 | #419bdf | água |
| 1 | #397d49 | árvores |
| 2 | #88b053 | grass |
| 3 | #7a87c6 | flooded_vegetation |
| 4 | #e49635 | plantações |
| 5 | #dfc35a | shrub_and_scrub |
| 6 | #c4281b | criados |
| 7 | #a59b8f | solo sem vegetação |
| 8 | #b39fe1 | snow_and_ice |
Propriedades da imagem
Propriedades da imagem
| Nome | Tipo | Descrição |
|---|---|---|
| dynamicworld_algorithm_version | STRING | A string de versão que identifica exclusivamente o modelo do Dynamic World e o processo de inferência usado para produzir a imagem. |
| qa_algorithm_version | STRING | A string de versão que identifica exclusivamente o processo de mascaramento de nuvens usado para produzir a imagem. |
Termos de Uso
Termos de Uso
Esse conjunto de dados é licenciado de acordo com a licença CC-BY 4.0 e exige a seguinte atribuição: "Esse conjunto de dados é produzido para o projeto Dynamic World pelo Google em parceria com a National Geographic Society e o World Resources Institute."
Contém dados modificados do Copernicus Sentinel [2015-presente]. Consulte o Aviso legal de dados do Sentinel (link em inglês).
Citações
Brown, C.F., Brumby, S.P., Guzder-Williams, B. et al. Dynamic World, Near real-time global 10 m land use land cover mapping. Sci Data 9, 251 (2022). doi:10.1038/s41597-022-01307-4
Identificadores DOI
Explore com o Earth Engine
Editor de código (JavaScript)
// Construct a collection of corresponding Dynamic World and Sentinel-2 for // inspection. Filter by region and date. var START = ee.Date('2021-04-02'); var END = START.advance(1, 'day'); var colFilter = ee.Filter.and( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END)); var dwCol = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(colFilter); var s2Col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); // Link DW and S2 source images. var linkedCol = dwCol.linkCollection(s2Col, s2Col.first().bandNames()); // Get example DW image with linked S2 image. var linkedImg = ee.Image(linkedCol.first()); // Create a visualization that blends DW class label with probability. // Define list pairs of DW LULC label and color. var CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice']; var VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1']; // Create an RGB image of the label (most likely class) on [0, 1]. var dwRgb = linkedImg .select('label') .visualize({min: 0, max: 8, palette: VIS_PALETTE}) .divide(255); // Get the most likely class probability. var top1Prob = linkedImg.select(CLASS_NAMES).reduce(ee.Reducer.max()); // Create a hillshade of the most likely class probability on [0, 1]; var top1ProbHillshade = ee.Terrain.hillshade(top1Prob.multiply(100)) .divide(255); // Combine the RGB image with the hillshade. var dwRgbHillshade = dwRgb.multiply(top1ProbHillshade); // Display the Dynamic World visualization with the source Sentinel-2 image. Map.setCenter(20.6729, 52.4305, 12); Map.addLayer( linkedImg, {min: 0, max: 3000, bands: ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C'); Map.addLayer( dwRgbHillshade, {min: 0, max: 0.65}, 'Dynamic World V1 - label hillshade');
import ee import geemap.core as geemap
Colab (Python)
# Construct a collection of corresponding Dynamic World and Sentinel-2 for # inspection. Filter by region and date. START = ee.Date('2021-04-02') END = START.advance(1, 'day') col_filter = ee.Filter.And( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END), ) dw_col = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(col_filter) s2_col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); # Link DW and S2 source images. linked_col = dw_col.linkCollection(s2_col, s2_col.first().bandNames()); # Get example DW image with linked S2 image. linked_image = ee.Image(linked_col.first()) # Create a visualization that blends DW class label with probability. # Define list pairs of DW LULC label and color. CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice', ] VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1', ] # Create an RGB image of the label (most likely class) on [0, 1]. dw_rgb = ( linked_image.select('label') .visualize(min=0, max=8, palette=VIS_PALETTE) .divide(255) ) # Get the most likely class probability. top1_prob = linked_image.select(CLASS_NAMES).reduce(ee.Reducer.max()) # Create a hillshade of the most likely class probability on [0, 1] top1_prob_hillshade = ee.Terrain.hillshade(top1_prob.multiply(100)).divide(255) # Combine the RGB image with the hillshade. dw_rgb_hillshade = dw_rgb.multiply(top1_prob_hillshade) # Display the Dynamic World visualization with the source Sentinel-2 image. m = geemap.Map() m.set_center(20.6729, 52.4305, 12) m.add_layer( linked_image, {'min': 0, 'max': 3000, 'bands': ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C', ) m.add_layer( dw_rgb_hillshade, {'min': 0, 'max': 0.65}, 'Dynamic World V1 - label hillshade', ) m