-
โมเดลความน่าจะเป็นของโกโก้ 2025a

คอลเล็กชันรูปภาพนี้แสดงความน่าจะเป็นโดยประมาณต่อพิกเซลที่พื้นที่ด้านล่างถูกครอบครองโดยสินค้าโภคภัณฑ์ การประมาณความน่าจะเป็นแสดงที่ความละเอียด 10 เมตร และสร้างขึ้นโดยโมเดลแมชชีนเลิร์นนิง ดูรายละเอียดได้ในเอกสารประกอบทางเทคนิคเกี่ยวกับ Forest Data Partnership … agriculture biodiversity cocoa conservation crop eudr -
โมเดลความน่าจะเป็นของโกโก้ 2025b

คอลเล็กชันรูปภาพนี้แสดงความน่าจะเป็นโดยประมาณต่อพิกเซลที่พื้นที่ด้านล่างถูกครอบครองโดยสินค้าโภคภัณฑ์ การประมาณความน่าจะเป็นแสดงที่ความละเอียด 10 เมตร และสร้างขึ้นโดยโมเดลแมชชีนเลิร์นนิง ดูรายละเอียดได้ในเอกสารประกอบทางเทคนิคเกี่ยวกับ Forest Data Partnership … agriculture alphaearth-derived biodiversity cocoa conservation crop -
โมเดลความน่าจะเป็นของกาแฟ 2025a

คอลเล็กชันรูปภาพนี้แสดงความน่าจะเป็นโดยประมาณต่อพิกเซลที่พื้นที่ด้านล่างถูกครอบครองโดยสินค้าโภคภัณฑ์ การประมาณความน่าจะเป็นแสดงที่ความละเอียด 10 เมตร และสร้างขึ้นโดยโมเดลแมชชีนเลิร์นนิง ดูรายละเอียดได้ในเอกสารประกอบทางเทคนิคเกี่ยวกับ Forest Data Partnership … agriculture biodiversity coffee conservation crop eudr -
โมเดลความน่าจะเป็นของกาแฟ 2025b

คอลเล็กชันรูปภาพนี้แสดงความน่าจะเป็นโดยประมาณต่อพิกเซลที่พื้นที่ด้านล่างถูกครอบครองโดยสินค้าโภคภัณฑ์ การประมาณความน่าจะเป็นแสดงที่ความละเอียด 10 เมตร และสร้างขึ้นโดยโมเดลแมชชีนเลิร์นนิง ดูรายละเอียดได้ในเอกสารประกอบทางเทคนิคเกี่ยวกับ Forest Data Partnership … agriculture alphaearth-derived biodiversity coffee conservation crop -
Farmscapes 2020
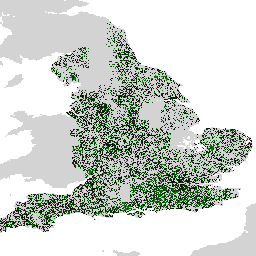
ชุดข้อมูล Farmscapes 2020 แสดงแผนที่ความน่าจะเป็นความละเอียดสูง (25 ซม.) สำหรับฟีเจอร์กึ่งธรรมชาติที่สำคัญ 3 รายการภายในภูมิทัศน์ทางการเกษตรของอังกฤษ ได้แก่ แนวพุ่มไม้ ป่าไม้ และกำแพงหิน ชุดข้อมูลนี้ได้รับการพัฒนาขึ้นโดยความร่วมมือกับ Oxford Leverhulme Centre for Nature Recovery เพื่อใช้เป็นข้อมูลพื้นฐานสำหรับแอปพลิเคชันต่างๆ เช่น … biodiversity climate conservation forest landuse-landcover nature-trace -
ความต่อเนื่องของป่า v0

รูปภาพนี้แสดงคะแนนต่อพิกเซล (ใน [0, 1]) ที่บ่งบอกว่าพื้นที่พิกเซลถูกครอบครองโดยป่าที่ไม่มีการรบกวนในปี 2020 หรือไม่ คะแนนเหล่านี้แสดงที่ความละเอียด 30 เมตร และสร้างขึ้นโดยแนวทางการรวมหลักฐานเพื่อรวมป่าหลายแห่งเข้าด้วยกัน … biodiversity conservation deforestation eudr forest-biomass forestdatapartnership -
การจำแนกประเภทป่า (ForTy) 2020 v1.0

ชุดข้อมูลการจำแนกประเภทป่า (ForTy) v1 ประกอบด้วยแผนที่ความน่าจะเป็นต่อคลาสทั่วโลกที่ความละเอียด 10 เมตร ซึ่งครอบคลุมพื้นที่ทั้งหมดระหว่างละติจูด 65°S ถึง 84°N สำหรับปี 2020 การจำแนกประเภท 6 คลาสสอดคล้องกับคำจำกัดความของ FAO และกฎระเบียบให้ความคุ้มครองข้อมูลส่วนบุคคลของผู้บริโภค (GDPR) ของสหภาพยุโรป: คลาส 1 … alphaearth-derived biodiversity climate conservation deforestation eudr -
แผนที่สวนปาล์มน้ำมันทั่วโลก

ชุดข้อมูลนี้เป็นแผนที่สวนปาล์มน้ำมันทั่วโลกความละเอียด 10 เมตรสำหรับอุตสาหกรรมและเกษตรกรรายย่อยในปี 2019 ซึ่งครอบคลุมพื้นที่ที่ตรวจพบสวนปาล์มน้ำมัน รูปภาพที่จำแนกประเภทเป็นเอาต์พุตของโครงข่ายระบบประสาทเทียมแบบคอนโวลูชันที่อิงตามภาพรวมครึ่งปีของ Sentinel-1 และ Sentinel-2 ดูข้อมูลเพิ่มเติมได้ที่บทความ … agriculture biodiversity conservation crop global landuse -
ป่าธรรมชาติของโลกปี 2020

ป่าธรรมชาติของโลกปี 2020 แสดงแผนที่ความน่าจะเป็นของป่าธรรมชาติทั่วโลกในปี 2020 ที่ความละเอียด 10 เมตร ซึ่งได้รับการพัฒนาขึ้นเพื่อสนับสนุนโครงการริเริ่มต่างๆ เช่น กฎระเบียบให้ความคุ้มครองข้อมูลส่วนบุคคลของผู้บริโภค (GDPR) ของสหภาพยุโรป และความพยายามอื่นๆ ในการอนุรักษ์และเฝ้าระวังรักษาป่า แผนที่ … biodiversity climate conservation deforestation eudr forest -
โมเดลความน่าจะเป็นของปาล์ม 2025a

คอลเล็กชันรูปภาพนี้แสดงความน่าจะเป็นโดยประมาณต่อพิกเซลที่พื้นที่ด้านล่างถูกครอบครองโดยสินค้าโภคภัณฑ์ การประมาณความน่าจะเป็นแสดงที่ความละเอียด 10 เมตร และสร้างขึ้นโดยโมเดลแมชชีนเลิร์นนิง ดูรายละเอียดได้ในเอกสารประกอบทางเทคนิคเกี่ยวกับ Forest Data Partnership … agriculture biodiversity conservation crop eudr forestdatapartnership -
โมเดลความน่าจะเป็นของปาล์ม 2025b

คอลเล็กชันรูปภาพนี้แสดงความน่าจะเป็นโดยประมาณต่อพิกเซลที่พื้นที่ด้านล่างถูกครอบครองโดยสินค้าโภคภัณฑ์ การประมาณความน่าจะเป็นแสดงที่ความละเอียด 10 เมตร และสร้างขึ้นโดยโมเดลแมชชีนเลิร์นนิง ดูรายละเอียดได้ในเอกสารประกอบทางเทคนิคเกี่ยวกับ Forest Data Partnership … agriculture alphaearth-derived biodiversity conservation crop eudr -
RESOLVE Ecoregions 2017

ชุดข้อมูล RESOLVE Ecoregions ซึ่งอัปเดตในปี 2017 แสดงภาพของเขตนิเวศทางบก 846 แห่งที่เป็นตัวแทนของโลกที่เราอาศัยอยู่ ดูแผนที่แบบมีสไตล์ได้ที่ https://ecoregions2017.appspot.com/ หรือใน Earth Engine เขตนิเวศในคำจำกัดความที่ง่ายที่สุดคือระบบนิเวศที่มีขอบเขตกว้างระดับภูมิภาค โดยเฉพาะอย่างยิ่ง เขตนิเวศเป็นตัวแทนของกลุ่มสิ่งมีชีวิตที่แตกต่างกัน … biodiversity conservation ecoregions ecosystems global table -
โมเดลความน่าจะเป็นของยาง 2025b

คอลเล็กชันรูปภาพนี้แสดงความน่าจะเป็นโดยประมาณต่อพิกเซลที่พื้นที่ด้านล่างถูกครอบครองโดยสินค้าโภคภัณฑ์ การประมาณความน่าจะเป็นแสดงที่ความละเอียด 10 เมตร และสร้างขึ้นโดยโมเดลแมชชีนเลิร์นนิง ดูรายละเอียดได้ในเอกสารประกอบทางเทคนิคเกี่ยวกับ Forest Data Partnership … agriculture alphaearth-derived biodiversity conservation crop eudr -
โมเดลความน่าจะเป็นของต้นยาง 2025a

คอลเล็กชันรูปภาพนี้แสดงความน่าจะเป็นโดยประมาณต่อพิกเซลที่พื้นที่ด้านล่างถูกครอบครองโดยสินค้าโภคภัณฑ์ การประมาณความน่าจะเป็นแสดงที่ความละเอียด 10 เมตร และสร้างขึ้นโดยโมเดลแมชชีนเลิร์นนิง ดูรายละเอียดได้ในเอกสารประกอบทางเทคนิคเกี่ยวกับ Forest Data Partnership … agriculture biodiversity conservation crop eudr forestdatapartnership -
การกระจายพันธุ์ของสัตว์เลี้ยงลูกด้วยนมในออสเตรเลีย

เอาต์พุตของโมเดลการกระจายพันธุ์เหล่านี้ได้รับการพัฒนาโดย Google ร่วมกับ QCIF และ EcoCommons ซึ่งแสดงถึงการประมาณความน่าจะเป็นของการเกิดพันธุ์สัมพัทธ์ (เช่น ค่าที่สูงขึ้นบ่งบอกถึงความน่าจะเป็นที่สูงขึ้นที่จะตรวจพบพันธุ์ที่ตำแหน่งหนึ่งๆ สำหรับวิธีการสำรวจที่กำหนดและข้อมูลการสำรวจที่กำหนด … alphaearth-derived biodiversity conservation ecosystems nature-trace publisher-dataset
Datasets tagged conservation in Earth Engine
[null,null,[],[],["The datasets include a 2019 global map of industrial and smallholder oil palm plantations derived from Sentinel-1 and Sentinel-2 data, and a 2017 depiction of 846 terrestrial ecoregions. Additionally, there are per-pixel probability models at 10-meter resolution for cocoa, palm, and rubber tree occupancy, as well as a 2020 per-pixel score indicating undisturbed forest areas. Each model is associated with GitHub README for additional information.\n"]]