- 資料集可用性
- 2018-04-30T10:50:26Z–2025-11-28T12:06:26Z
- 資料集供應來源
- 歐盟/歐洲太空總署/哥白尼計畫
- 再訪間隔
- 2 天
- 標記
說明
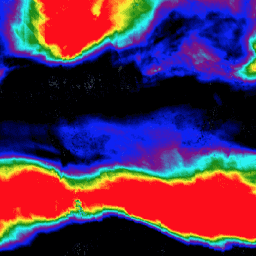
OFFL/L3_O3_TCL
這項資料集提供離線對流層高解析度影像,顯示 20N 和 20S 之間的臭氧濃度。另請參閱 COPERNICUS/S5P/OFFL/L3_O3 和 COPERNICUS/S5P/NRTI/L3_O3,查看總柱狀資料。
在平流層中,臭氧層可保護生物圈免於危險的太陽紫外線輻射。在對流層中,臭氧是有效的淨化劑,但濃度過高時,也會對人類、動物和植被的健康造成危害。臭氧也是造成氣候變遷的重要溫室氣體。自 1980 年代發現南極臭氧洞,隨後制定《蒙特婁議定書》來管制含氯臭氧層破壞物質的產生,其後科學家便定期從地面和太空監測臭氧。
這項產品採用對流雲差 (CCD) 和雲層切片 (CSA) 演算法。產品使用手冊。 更多資訊。
與所有其他 S5P 產品不同,這個產品是直接擷取,並未使用 harpconvert,因為它已經是格狀產品。系統會遮蓋 qa_value<=70 的像素。
Sentinel-5 Precursor
Sentinel-5 Precursor 衛星由歐洲太空總署於 2017 年 10 月 13 日發射,用於監控空氣汙染。機載感應器通常稱為 Tropomi (對流層監測儀器)。
除了 CH4,所有 S5P 資料集都有兩個版本:近乎即時 (NRTI) 和離線 (OFFL)。CH4 僅提供 OFFL 版本。NRTI 資產涵蓋的範圍比 OFFL 資產小,但擷取後出現的速度較快。OFFL 資產包含單一軌道資料 (由於地球有一半處於黑暗狀態,因此只包含單一半球的資料)。
由於資料中存在雜訊,因此在乾淨區域或二氧化硫排放量較低時,通常會觀察到負向垂直資料欄值。建議您不要篩選這些值,但離群值除外,也就是低於 -0.001 mol/m^2 的直向資料欄。
原始的 Sentinel 5P Level 2 (L2) 資料是依時間分組,而非依緯度/經度分組。為將資料擷取至 Earth Engine,每個 Sentinel 5P L2 產品都會轉換為 L3,並保留每個軌道的單一格線 (也就是說,不會彙整產品)。
跨越子午線的來源產品會以兩個 Earth Engine 資產的形式擷取,並加上 _1 和 _2 後置字元。
轉換為 L3 是由 harpconvert 工具使用 bin_spatial 作業完成。系統會篩選來源資料,移除 QA 值小於下列值的像素:
- AER_AI 80%
- NO2 的 tropospheric_NO2_column_number_density 頻帶為 75%
- O3 和 SO2 以外的所有其他資料集:50%
直接擷取 O3_TCL 產品 (不執行 harpconvert)。
頻帶
像素大小
111320 公尺
Y 像素大小
55660 公尺
波段
| 名稱 | 單位 | 像素大小 | 說明 |
|---|---|---|---|
ozone_tropospheric_mixing_ratio |
mol/m^2 | 公尺 | 根據 CCD 演算法計算的平均對流層臭氧混合比。 |
ozone_tropospheric_mixing_ratio_precision |
mol/m^2 | 公尺 | 根據 CCD 演算法計算的對流層臭氧混合比標準差。 |
ozone_tropospheric_vertical_column |
mol/m^2 | 公尺 | 根據 CCD 演算法計算的平均對流層臭氧柱。 |
ozone_tropospheric_vertical_column_precision |
mol/m^2 | 公尺 | 根據 CCD 演算法計算的對流層臭氧柱標準差。 |
qa_value |
mol/m^2 | 公尺 | 連續品質描述元,介於 0 (無資料) 和 100 (完整品質資料) 之間。系統會遮蓋 qa_value <= 70 的像素。 |
圖片屬性
影像屬性
| 名稱 | 類型 | 說明 |
|---|---|---|
| ALGORITHM_VERSION | STRING | L2 資料處理過程使用的演算法版本。此版本獨立於處理器(框架)版本,以因應不同產品的發布時程。 |
| BUILD_DATE | STRING | 用於 L2 資料處理的軟體建構日期,以自 1970 年 1 月 1 日起算的毫秒數表示。 |
| HARP_VERSION | INT | 用於將 L2 資料格狀化為 L3 產品的 HARP 工具版本。 |
| INSTITUTION | STRING | 執行 L1 到 L2 資料處理的機構。 |
| L3_PROCESSING_TIME | INT | Google 使用 harpconvert 將 L2 資料處理為 L3 資料的日期,以自 1970 年 1 月 1 日起算的毫秒數表示。 |
| LAT_MAX | DOUBLE | 資產的最大緯度 (以度為單位)。 |
| LAT_MIN | DOUBLE | 資產的最低緯度 (以度為單位)。 |
| LON_MAX | DOUBLE | 資產的最大經度 (以度為單位)。 |
| LON_MIN | DOUBLE | 資產的最小經度 (以度為單位)。 |
| ORBIT | INT | 取得資料時的衛星軌道編號。 |
| PLATFORM | STRING | 用以取得資料的平台名稱。 |
| PROCESSING_STATUS | STRING | 產品在全球層級的處理狀態,主要取決於輔助輸入資料的可用性。可能的值為「Nominal」和「Degraded」。 |
| PROCESSOR_VERSION | STRING | 用於 L2 資料處理的軟體版本,格式為「major.minor.patch」的字串。 |
| PRODUCT_ID | STRING | 用於產生這項資產的 L2 產品 ID。 |
| PRODUCT_QUALITY | STRING | 指出產品品質是否下降的指標。允許的值為「Degraded」和「Nominal」。 |
| SENSOR | STRING | 用以取得資料的感應器名稱。 |
| SPATIAL_RESOLUTION | STRING | 天底點的空間解析度。除了 |
| TIME_REFERENCE_DAYS_SINCE_1950 | INT | 自 1950 年 1 月 1 日起到取得資料當天的天數。 |
| TIME_REFERENCE_JULIAN_DAY | DOUBLE | 取得資料時的儒略日數。 |
| TRACKING_ID | STRING | L2 產品檔案的 UUID。 |
使用條款
使用條款
使用 Sentinel 資料時,須遵守《Copernicus Sentinel Data Terms and Conditions》。
使用 Earth Engine 探索
程式碼編輯器 (JavaScript)
var collection = ee.ImageCollection('COPERNICUS/S5P/OFFL/L3_O3_TCL') .select('ozone_tropospheric_vertical_column') .filterDate('2019-06-01', '2019-07-01'); var band_viz = { min: 0, max: 0.02, palette: ['black', 'blue', 'purple', 'cyan', 'green', 'yellow', 'red'] }; Map.addLayer(collection.mean(), band_viz, 'S5P O3'); Map.setCenter(0.0, 0.0, 2);