
באמצעות ה-API לזיהוי רשת הפנים של ML Kit, אפשר ליצור רשת ברמת דיוק גבוהה בזמן אמת של 468 נקודות בתלת-ממד בשביל תמונות שדומות לתמונות סלפי. הפנים צריכות להיות בטווח של כ-2 מטרים מהמצלמה.
אם רוצים לזהות פנים שנמצאים במרחק של כ-2 מטרים מהמצלמה, כדאי לעיין במאמר SDK לזיהוי פנים של ML Kit.
הנה כמה מהמונחים שבהם נעשה שימוש בתכונה 'זיהוי רשת פנים':
- התיבה התוחמת היא אזור מלבני של פנים שזוהו.
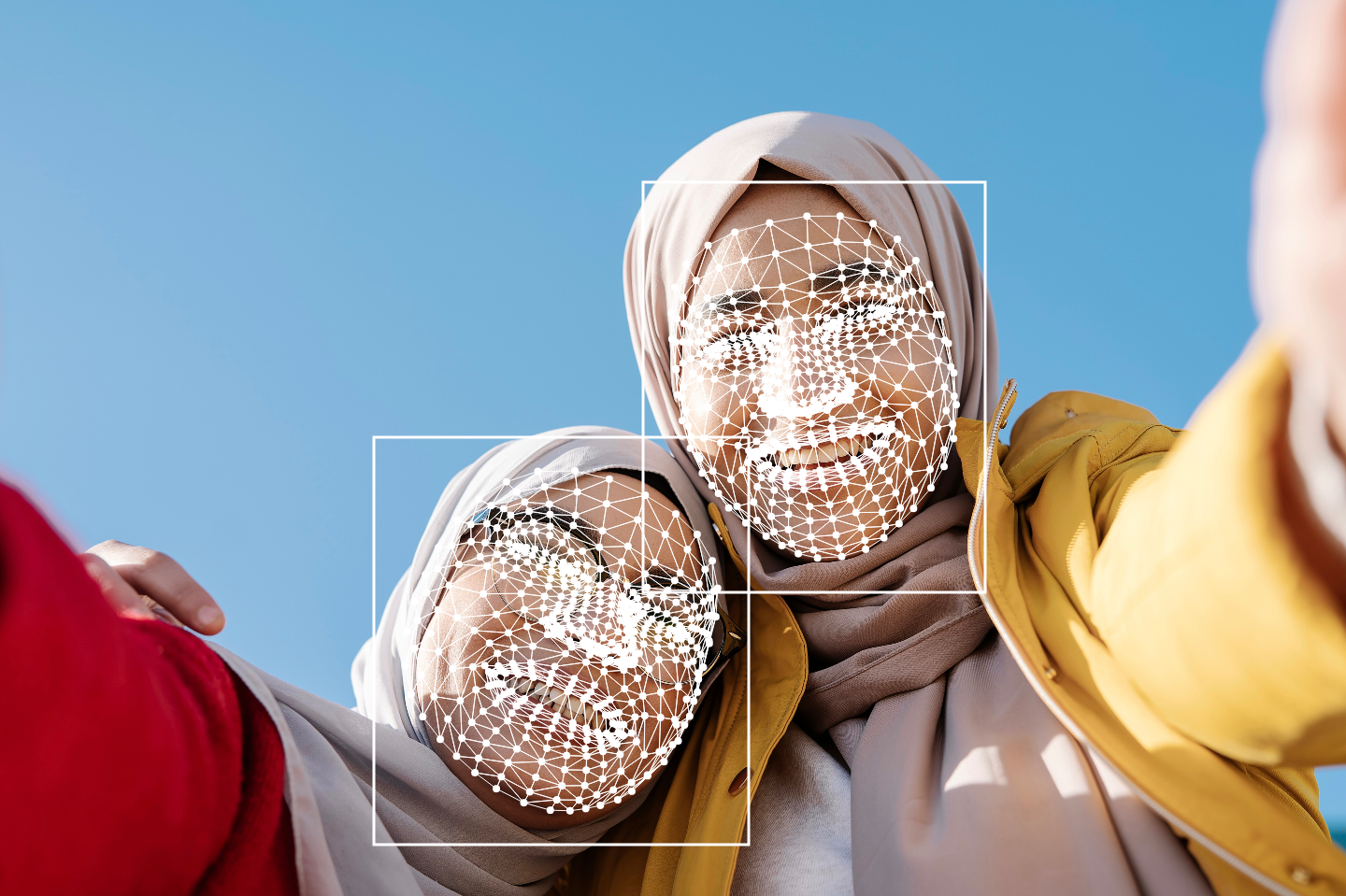
- הפיצ'ר Face mesh info הוא קבוצה של 468 נקודות וקצוות בתלת-ממד, שאפשר להשתמש בהם כדי לצייר רשת גיאומטרית של פנים שזוהו.
ה-API לזיהוי של רשת הפנים יוצר רשת פנים לפנים שזוהו, שבכל אחת מהן יש 468 נקודות וקצוות בתלת-ממד. בעזרת התכונה 'זיהוי רשת פנים' אפשר לבצע פעולות מדויקות יותר לפנים בזמן אמת, כמו מסנני AR, צילום תמונת סלפי ווידאו צ'אט.
יכולות עיקריות
- זיהוי ואיתור של פנים הצגת התיבה התוחמת פרצופים שזוהו בתמונה דמוית סלפי.
- קבלת מידע על רשת הפנים קבלת מידע על נקודות בתלת-ממד ב-468 ושל המשולש לכל פנים שזוהו.
- עיבוד פריימים של סרטונים בזמן אמת: זיהוי הפנים מבוצע במכשיר, והוא מהיר מספיק לשימוש באפליקציות בזמן אמת, כמו הפעלת מניפולציות על הסרטון.
תוצאות לדוגמה
| קלט | פלט (מצב 'תיבת גבולות בלבד') | פלט (מצב 'רשת פנים') |
|---|---|---|
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
השוואה ל-SDK לזיהוי פנים של ML Kit
| Face mesh Identification API | API לזיהוי פנים | |
| תרחיש לדוגמה מומלץ (דוגמאות) |
|
|
| זמן אחזור | נמוכה (כ-14 אלפיות השנייה ב-Pixel 3)
מומלץ להשתמש בזמן אמת |
בינונית (כ-60 אלפיות השנייה ב-Pixel 3 כשמצב מהיר מופעל) |
| קלט מומלץ | פנים שצולמו בטווח של כ-2 מטרים | כל תמונה עם פנים |
| פלט של נקודות הפנים | לכל פנים, 468 נקודות בתלת-ממד ומידע על משולשים כשמצב 'רשת פנים' מופעל. | לכל פנים מופיעות 133 נקודות דו-ממדיות כשמצב 'מתאר הפנים' מופעל. |
| זוהו # פנים |
|
|
| מזהה לצורכי מעקב | לא | כן |
| כיוון הפנים | לא | כן |
| סיווג פנים (למשל, חיוך) | לא | כן |
| אפשרויות הטמעה | בחבילה בלבד | בחבילה או לא |
| גודל האפליקציה | בחבילה: ~6.4 MB
לא זמין: עדיין לא זמין |
בחבילה: ~6.9Mb
לא מקובצות: ~0.6Mb |