
В следующих разделах представлен пример проблемы LP и показано, как ее решить. Вот проблема:
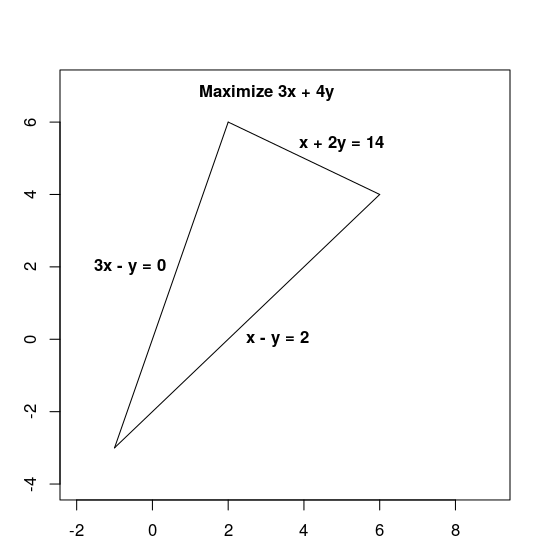
Максимизируйте 3x + 4y при следующих ограничениях:
-
x + 2y≤ 14 -
3x - y≥ 0 -
x - y≤ 2
И целевая функция 3x + 4y , и ограничения задаются линейными выражениями, что делает эту задачу линейной.
Ограничения определяют допустимую область, которая представляет собой треугольник, показанный ниже, включая его внутреннюю часть.
Основные шаги решения проблемы ЛП
Для решения проблемы ЛП ваша программа должна включать следующие шаги:
- Импортируйте оболочку линейного решателя,
- объявить решатель LP,
- определить переменные,
- определить ограничения,
- определить цель,
- вызвать решатель ЛП; и
- покажи решение
Решение с помощью MPsolver
В следующем разделе представлена программа, которая решает проблему с помощью оболочки MPsolver и решателя LP.
Примечание. Для запуска приведенной ниже программы вам необходимо установить OR-Tools .
Основным решателем линейной оптимизации OR-Tools является Glop , собственный решатель линейного программирования Google. Он быстрый, эффективно использует память и численно стабилен.
Импортируйте оболочку линейного решателя
Импортируйте (или включите) оболочку линейного решателя OR-Tools, интерфейс для решателей MIP и линейных решателей, как показано ниже.
Питон
from ortools.linear_solver import pywraplp
С++
#include <iostream> #include <memory> #include "ortools/linear_solver/linear_solver.h"
Ява
import com.google.ortools.Loader; import com.google.ortools.linearsolver.MPConstraint; import com.google.ortools.linearsolver.MPObjective; import com.google.ortools.linearsolver.MPSolver; import com.google.ortools.linearsolver.MPVariable;
С#
using System; using Google.OrTools.LinearSolver;
Объявить решатель LP
MPsolver — это оболочка для нескольких различных решателей, включая Glop. Код ниже объявляет решатель GLOP.
Питон
solver = pywraplp.Solver.CreateSolver("GLOP") if not solver: return
С++
std::unique_ptr<MPSolver> solver(MPSolver::CreateSolver("SCIP")); if (!solver) { LOG(WARNING) << "SCIP solver unavailable."; return; }
Ява
MPSolver solver = MPSolver.createSolver("GLOP");С#
Solver solver = Solver.CreateSolver("GLOP"); if (solver is null) { return; }
Примечание. Замените GLOP на PDLP , чтобы использовать альтернативный решатель LP. Подробнее о выборе решателей см. расширенное решение ЛП , а об установке сторонних решателей см. руководство по установке .
Создайте переменные
Сначала создайте переменные x и y , значения которых находятся в диапазоне от 0 до бесконечности.
Питон
x = solver.NumVar(0, solver.infinity(), "x") y = solver.NumVar(0, solver.infinity(), "y") print("Number of variables =", solver.NumVariables())
С++
const double infinity = solver->infinity(); // x and y are non-negative variables. MPVariable* const x = solver->MakeNumVar(0.0, infinity, "x"); MPVariable* const y = solver->MakeNumVar(0.0, infinity, "y"); LOG(INFO) << "Number of variables = " << solver->NumVariables();
Ява
double infinity = java.lang.Double.POSITIVE_INFINITY; // x and y are continuous non-negative variables. MPVariable x = solver.makeNumVar(0.0, infinity, "x"); MPVariable y = solver.makeNumVar(0.0, infinity, "y"); System.out.println("Number of variables = " + solver.numVariables());
С#
Variable x = solver.MakeNumVar(0.0, double.PositiveInfinity, "x"); Variable y = solver.MakeNumVar(0.0, double.PositiveInfinity, "y"); Console.WriteLine("Number of variables = " + solver.NumVariables());
Определите ограничения
Затем определите ограничения на переменные. Дайте каждому ограничению уникальное имя (например, constraint0 ), а затем определите коэффициенты для ограничения.
Питон
# Constraint 0: x + 2y <= 14. solver.Add(x + 2 * y <= 14.0) # Constraint 1: 3x - y >= 0. solver.Add(3 * x - y >= 0.0) # Constraint 2: x - y <= 2. solver.Add(x - y <= 2.0) print("Number of constraints =", solver.NumConstraints())
С++
// x + 2*y <= 14. MPConstraint* const c0 = solver->MakeRowConstraint(-infinity, 14.0); c0->SetCoefficient(x, 1); c0->SetCoefficient(y, 2); // 3*x - y >= 0. MPConstraint* const c1 = solver->MakeRowConstraint(0.0, infinity); c1->SetCoefficient(x, 3); c1->SetCoefficient(y, -1); // x - y <= 2. MPConstraint* const c2 = solver->MakeRowConstraint(-infinity, 2.0); c2->SetCoefficient(x, 1); c2->SetCoefficient(y, -1); LOG(INFO) << "Number of constraints = " << solver->NumConstraints();
Ява
// x + 2*y <= 14. MPConstraint c0 = solver.makeConstraint(-infinity, 14.0, "c0"); c0.setCoefficient(x, 1); c0.setCoefficient(y, 2); // 3*x - y >= 0. MPConstraint c1 = solver.makeConstraint(0.0, infinity, "c1"); c1.setCoefficient(x, 3); c1.setCoefficient(y, -1); // x - y <= 2. MPConstraint c2 = solver.makeConstraint(-infinity, 2.0, "c2"); c2.setCoefficient(x, 1); c2.setCoefficient(y, -1); System.out.println("Number of constraints = " + solver.numConstraints());
С#
// x + 2y <= 14. solver.Add(x + 2 * y <= 14.0); // 3x - y >= 0. solver.Add(3 * x - y >= 0.0); // x - y <= 2. solver.Add(x - y <= 2.0); Console.WriteLine("Number of constraints = " + solver.NumConstraints());
Определите целевую функцию
Следующий код определяет целевую функцию 3x + 4y и указывает, что это задача максимизации.
Питон
# Objective function: 3x + 4y. solver.Maximize(3 * x + 4 * y)
С++
// Objective function: 3x + 4y. MPObjective* const objective = solver->MutableObjective(); objective->SetCoefficient(x, 3); objective->SetCoefficient(y, 4); objective->SetMaximization();
Ява
// Maximize 3 * x + 4 * y. MPObjective objective = solver.objective(); objective.setCoefficient(x, 3); objective.setCoefficient(y, 4); objective.setMaximization();
С#
// Objective function: 3x + 4y. solver.Maximize(3 * x + 4 * y);
Вызов решателя
Следующий код вызывает решатель.
Питон
print(f"Solving with {solver.SolverVersion()}")
status = solver.Solve()С++
const MPSolver::ResultStatus result_status = solver->Solve(); // Check that the problem has an optimal solution. if (result_status != MPSolver::OPTIMAL) { LOG(FATAL) << "The problem does not have an optimal solution!"; }
Ява
final MPSolver.ResultStatus resultStatus = solver.solve();
С#
Solver.ResultStatus resultStatus = solver.Solve();
Показать решение
Следующий код отображает решение.
Питон
if status == pywraplp.Solver.OPTIMAL:
print("Solution:")
print(f"Objective value = {solver.Objective().Value():0.1f}")
print(f"x = {x.solution_value():0.1f}")
print(f"y = {y.solution_value():0.1f}")
else:
print("The problem does not have an optimal solution.")С++
LOG(INFO) << "Solution:"; LOG(INFO) << "Optimal objective value = " << objective->Value(); LOG(INFO) << x->name() << " = " << x->solution_value(); LOG(INFO) << y->name() << " = " << y->solution_value();
Ява
if (resultStatus == MPSolver.ResultStatus.OPTIMAL) { System.out.println("Solution:"); System.out.println("Objective value = " + objective.value()); System.out.println("x = " + x.solutionValue()); System.out.println("y = " + y.solutionValue()); } else { System.err.println("The problem does not have an optimal solution!"); }
С#
// Check that the problem has an optimal solution. if (resultStatus != Solver.ResultStatus.OPTIMAL) { Console.WriteLine("The problem does not have an optimal solution!"); return; } Console.WriteLine("Solution:"); Console.WriteLine("Objective value = " + solver.Objective().Value()); Console.WriteLine("x = " + x.SolutionValue()); Console.WriteLine("y = " + y.SolutionValue());
Полные программы
Полные программы показаны ниже.
Питон
from ortools.linear_solver import pywraplp def LinearProgrammingExample(): """Linear programming sample.""" # Instantiate a Glop solver, naming it LinearExample. solver = pywraplp.Solver.CreateSolver("GLOP") if not solver: return # Create the two variables and let them take on any non-negative value. x = solver.NumVar(0, solver.infinity(), "x") y = solver.NumVar(0, solver.infinity(), "y") print("Number of variables =", solver.NumVariables()) # Constraint 0: x + 2y <= 14. solver.Add(x + 2 * y <= 14.0) # Constraint 1: 3x - y >= 0. solver.Add(3 * x - y >= 0.0) # Constraint 2: x - y <= 2. solver.Add(x - y <= 2.0) print("Number of constraints =", solver.NumConstraints()) # Objective function: 3x + 4y. solver.Maximize(3 * x + 4 * y) # Solve the system. print(f"Solving with {solver.SolverVersion()}") status = solver.Solve() if status == pywraplp.Solver.OPTIMAL: print("Solution:") print(f"Objective value = {solver.Objective().Value():0.1f}") print(f"x = {x.solution_value():0.1f}") print(f"y = {y.solution_value():0.1f}") else: print("The problem does not have an optimal solution.") print("\nAdvanced usage:") print(f"Problem solved in {solver.wall_time():d} milliseconds") print(f"Problem solved in {solver.iterations():d} iterations") LinearProgrammingExample()
С++
#include <iostream> #include <memory> #include "ortools/linear_solver/linear_solver.h" namespace operations_research { void LinearProgrammingExample() { std::unique_ptr<MPSolver> solver(MPSolver::CreateSolver("SCIP")); if (!solver) { LOG(WARNING) << "SCIP solver unavailable."; return; } const double infinity = solver->infinity(); // x and y are non-negative variables. MPVariable* const x = solver->MakeNumVar(0.0, infinity, "x"); MPVariable* const y = solver->MakeNumVar(0.0, infinity, "y"); LOG(INFO) << "Number of variables = " << solver->NumVariables(); // x + 2*y <= 14. MPConstraint* const c0 = solver->MakeRowConstraint(-infinity, 14.0); c0->SetCoefficient(x, 1); c0->SetCoefficient(y, 2); // 3*x - y >= 0. MPConstraint* const c1 = solver->MakeRowConstraint(0.0, infinity); c1->SetCoefficient(x, 3); c1->SetCoefficient(y, -1); // x - y <= 2. MPConstraint* const c2 = solver->MakeRowConstraint(-infinity, 2.0); c2->SetCoefficient(x, 1); c2->SetCoefficient(y, -1); LOG(INFO) << "Number of constraints = " << solver->NumConstraints(); // Objective function: 3x + 4y. MPObjective* const objective = solver->MutableObjective(); objective->SetCoefficient(x, 3); objective->SetCoefficient(y, 4); objective->SetMaximization(); const MPSolver::ResultStatus result_status = solver->Solve(); // Check that the problem has an optimal solution. if (result_status != MPSolver::OPTIMAL) { LOG(FATAL) << "The problem does not have an optimal solution!"; } LOG(INFO) << "Solution:"; LOG(INFO) << "Optimal objective value = " << objective->Value(); LOG(INFO) << x->name() << " = " << x->solution_value(); LOG(INFO) << y->name() << " = " << y->solution_value(); } } // namespace operations_research int main(int argc, char** argv) { operations_research::LinearProgrammingExample(); return EXIT_SUCCESS; }
Ява
package com.google.ortools.linearsolver.samples; import com.google.ortools.Loader; import com.google.ortools.linearsolver.MPConstraint; import com.google.ortools.linearsolver.MPObjective; import com.google.ortools.linearsolver.MPSolver; import com.google.ortools.linearsolver.MPVariable; /** Simple linear programming example. */ public final class LinearProgrammingExample { public static void main(String[] args) { Loader.loadNativeLibraries(); MPSolver solver = MPSolver.createSolver("GLOP"); double infinity = java.lang.Double.POSITIVE_INFINITY; // x and y are continuous non-negative variables. MPVariable x = solver.makeNumVar(0.0, infinity, "x"); MPVariable y = solver.makeNumVar(0.0, infinity, "y"); System.out.println("Number of variables = " + solver.numVariables()); // x + 2*y <= 14. MPConstraint c0 = solver.makeConstraint(-infinity, 14.0, "c0"); c0.setCoefficient(x, 1); c0.setCoefficient(y, 2); // 3*x - y >= 0. MPConstraint c1 = solver.makeConstraint(0.0, infinity, "c1"); c1.setCoefficient(x, 3); c1.setCoefficient(y, -1); // x - y <= 2. MPConstraint c2 = solver.makeConstraint(-infinity, 2.0, "c2"); c2.setCoefficient(x, 1); c2.setCoefficient(y, -1); System.out.println("Number of constraints = " + solver.numConstraints()); // Maximize 3 * x + 4 * y. MPObjective objective = solver.objective(); objective.setCoefficient(x, 3); objective.setCoefficient(y, 4); objective.setMaximization(); final MPSolver.ResultStatus resultStatus = solver.solve(); if (resultStatus == MPSolver.ResultStatus.OPTIMAL) { System.out.println("Solution:"); System.out.println("Objective value = " + objective.value()); System.out.println("x = " + x.solutionValue()); System.out.println("y = " + y.solutionValue()); } else { System.err.println("The problem does not have an optimal solution!"); } System.out.println("\nAdvanced usage:"); System.out.println("Problem solved in " + solver.wallTime() + " milliseconds"); System.out.println("Problem solved in " + solver.iterations() + " iterations"); } private LinearProgrammingExample() {} }
С#
using System; using Google.OrTools.LinearSolver; public class LinearProgrammingExample { static void Main() { Solver solver = Solver.CreateSolver("GLOP"); if (solver is null) { return; } // x and y are continuous non-negative variables. Variable x = solver.MakeNumVar(0.0, double.PositiveInfinity, "x"); Variable y = solver.MakeNumVar(0.0, double.PositiveInfinity, "y"); Console.WriteLine("Number of variables = " + solver.NumVariables()); // x + 2y <= 14. solver.Add(x + 2 * y <= 14.0); // 3x - y >= 0. solver.Add(3 * x - y >= 0.0); // x - y <= 2. solver.Add(x - y <= 2.0); Console.WriteLine("Number of constraints = " + solver.NumConstraints()); // Objective function: 3x + 4y. solver.Maximize(3 * x + 4 * y); Solver.ResultStatus resultStatus = solver.Solve(); // Check that the problem has an optimal solution. if (resultStatus != Solver.ResultStatus.OPTIMAL) { Console.WriteLine("The problem does not have an optimal solution!"); return; } Console.WriteLine("Solution:"); Console.WriteLine("Objective value = " + solver.Objective().Value()); Console.WriteLine("x = " + x.SolutionValue()); Console.WriteLine("y = " + y.SolutionValue()); Console.WriteLine("\nAdvanced usage:"); Console.WriteLine("Problem solved in " + solver.WallTime() + " milliseconds"); Console.WriteLine("Problem solved in " + solver.Iterations() + " iterations"); } }
Оптимальное решение
Программа возвращает оптимальное решение задачи, как показано ниже.
Number of variables = 2
Number of constraints = 3
Solution:
x = 6.0
y = 4.0
Optimal objective value = 34.0
Вот график, показывающий решение:
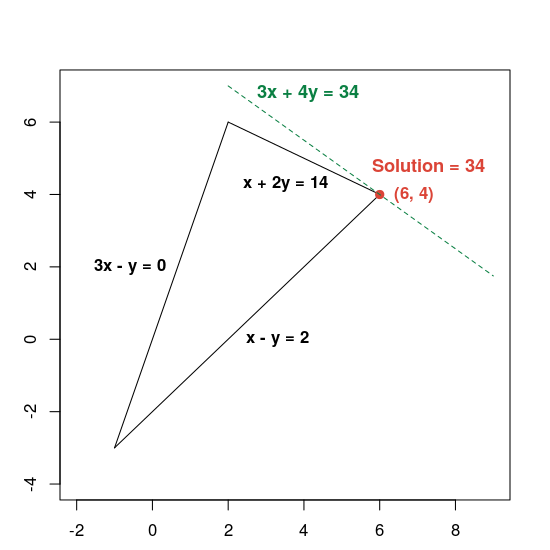
Пунктирная зеленая линия определяется путем установки целевой функции, равной ее оптимальному значению 34. Любая линия, уравнение которой имеет форму 3x + 4y = c , параллельна пунктирной линии, а 34 — это наибольшее значение c, для которого линия пересекает допустимую область.
Дополнительные сведения о решении задач линейной оптимизации см. в разделе расширенное решение LP .