
Aşağıdaki bölümlerde MIP problemi örneği ve nasıl çözüleceği gösterilmektedir. Sorun şudur:
x + 10y değerini aşağıdaki kısıtlamalara tabi olarak en üst düzeye çıkarın:
x + 7y≤ 17,5- 0 ≤
x≤ 3,5 - 0 ≤
y x,ytam sayı
Kısıtlamalar doğrusal olduğundan bu, çözümlerin tam sayı olmasını gerektiren doğrusal bir optimizasyon problemidir. Aşağıdaki grafikte, sorun için uygun bölgedeki tam sayı noktaları gösterilmektedir.
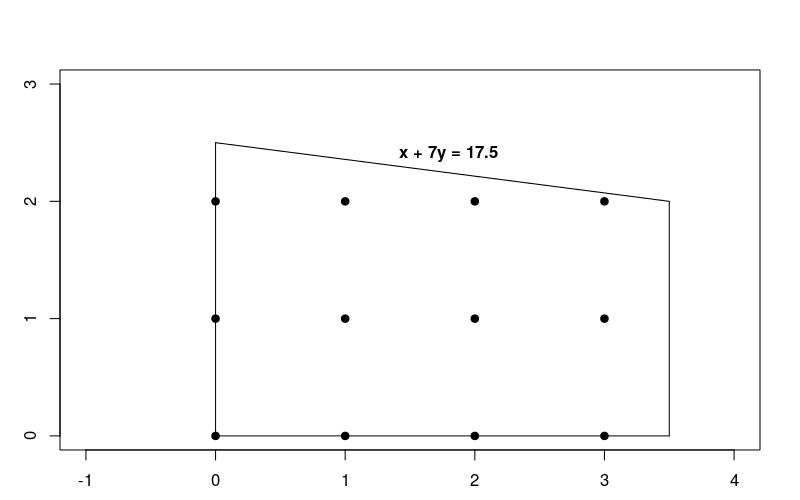
Bu problemin LP Sorunu Çözme bölümünde açıklanan doğrusal optimizasyon problemine çok benzer olduğuna dikkat edin. Ancak burada çözümlerin tam sayı olması gerekir.
MIP problemlerini çözmeye yönelik temel adımlar
MIP sorununu çözmek için, programınız aşağıdaki adımları içermelidir:
- Doğrusal çözücü sarmalayıcısını içe aktarın.
- MIP çözücüyü tanımlayın,
- değişkenleri tanımlayın,
- kısıtları tanımlamanız,
- hedefi tanımlayın
- MIP çözücüyü çağırın ve
- çözümü göster
MPSolver kullanan çözüm
Aşağıdaki bölümde MPSolver sarmalayıcısı ve MIP çözücü kullanarak problemi çözen bir program sunulmaktadır.
Varsayılan VEYA araçları MIP çözücüsü SCIP'dir.
Doğrusal çözücü sarmalayıcıyı içe aktarma
Aşağıda gösterildiği gibi, MIP çözücüler ve doğrusal çözücülere yönelik bir arayüz olan VEYA Araçları doğrusal çözücü sarmalayıcısını içe aktarın (veya dahil edin).
Python
from ortools.linear_solver import pywraplp
C++
#include <memory> #include "ortools/linear_solver/linear_solver.h"
Java
import com.google.ortools.Loader; import com.google.ortools.linearsolver.MPConstraint; import com.google.ortools.linearsolver.MPObjective; import com.google.ortools.linearsolver.MPSolver; import com.google.ortools.linearsolver.MPVariable;
C#
using System; using Google.OrTools.LinearSolver;
MIP çözücüyü tanımlama
Aşağıdaki kod, problem için MIP çözücüyü tanımlar. Bu örnekte üçüncü taraf çözücü SCIP kullanılmıştır.
Python
# Create the mip solver with the SCIP backend.
solver = pywraplp.Solver.CreateSolver("SAT")
if not solver:
return
C++
// Create the mip solver with the SCIP backend.
std::unique_ptr<MPSolver> solver(MPSolver::CreateSolver("SCIP"));
if (!solver) {
LOG(WARNING) << "SCIP solver unavailable.";
return;
}
Java
// Create the linear solver with the SCIP backend.
MPSolver solver = MPSolver.createSolver("SCIP");
if (solver == null) {
System.out.println("Could not create solver SCIP");
return;
}
C#
// Create the linear solver with the SCIP backend.
Solver solver = Solver.CreateSolver("SCIP");
if (solver is null)
{
return;
}
Değişkenleri tanımlayın
Aşağıdaki kod, sorundaki değişkenleri tanımlar.
Python
infinity = solver.infinity()
# x and y are integer non-negative variables.
x = solver.IntVar(0.0, infinity, "x")
y = solver.IntVar(0.0, infinity, "y")
print("Number of variables =", solver.NumVariables())
C++
const double infinity = solver->infinity(); // x and y are integer non-negative variables. MPVariable* const x = solver->MakeIntVar(0.0, infinity, "x"); MPVariable* const y = solver->MakeIntVar(0.0, infinity, "y"); LOG(INFO) << "Number of variables = " << solver->NumVariables();
Java
double infinity = java.lang.Double.POSITIVE_INFINITY;
// x and y are integer non-negative variables.
MPVariable x = solver.makeIntVar(0.0, infinity, "x");
MPVariable y = solver.makeIntVar(0.0, infinity, "y");
System.out.println("Number of variables = " + solver.numVariables());
C#
// x and y are integer non-negative variables.
Variable x = solver.MakeIntVar(0.0, double.PositiveInfinity, "x");
Variable y = solver.MakeIntVar(0.0, double.PositiveInfinity, "y");
Console.WriteLine("Number of variables = " + solver.NumVariables());
Program, negatif olmayan tam sayı değerlerini alan x ve y değişkenlerini oluşturmak için MakeIntVar yöntemini (veya kodlama diline bağlı olarak bir varyantı) kullanır.
Kısıtlamaları tanımlama
Aşağıdaki kod, soruna ilişkin kısıtlamaları tanımlar.
Python
# x + 7 * y <= 17.5.
solver.Add(x + 7 * y <= 17.5)
# x <= 3.5.
solver.Add(x <= 3.5)
print("Number of constraints =", solver.NumConstraints())
C++
// x + 7 * y <= 17.5. MPConstraint* const c0 = solver->MakeRowConstraint(-infinity, 17.5, "c0"); c0->SetCoefficient(x, 1); c0->SetCoefficient(y, 7); // x <= 3.5. MPConstraint* const c1 = solver->MakeRowConstraint(-infinity, 3.5, "c1"); c1->SetCoefficient(x, 1); c1->SetCoefficient(y, 0); LOG(INFO) << "Number of constraints = " << solver->NumConstraints();
Java
// x + 7 * y <= 17.5.
MPConstraint c0 = solver.makeConstraint(-infinity, 17.5, "c0");
c0.setCoefficient(x, 1);
c0.setCoefficient(y, 7);
// x <= 3.5.
MPConstraint c1 = solver.makeConstraint(-infinity, 3.5, "c1");
c1.setCoefficient(x, 1);
c1.setCoefficient(y, 0);
System.out.println("Number of constraints = " + solver.numConstraints());
C#
// x + 7 * y <= 17.5.
solver.Add(x + 7 * y <= 17.5);
// x <= 3.5.
solver.Add(x <= 3.5);
Console.WriteLine("Number of constraints = " + solver.NumConstraints());
Hedefi tanımlama
Aşağıdaki kod, bu sorunun objective function öğesini tanımlar.
Python
# Maximize x + 10 * y. solver.Maximize(x + 10 * y)
C++
// Maximize x + 10 * y. MPObjective* const objective = solver->MutableObjective(); objective->SetCoefficient(x, 1); objective->SetCoefficient(y, 10); objective->SetMaximization();
Java
// Maximize x + 10 * y. MPObjective objective = solver.objective(); objective.setCoefficient(x, 1); objective.setCoefficient(y, 10); objective.setMaximization();
C#
// Maximize x + 10 * y. solver.Maximize(x + 10 * y);
Çözücüyü arayın
Aşağıdaki kod çözücüyü çağırır.
Python
print(f"Solving with {solver.SolverVersion()}")
status = solver.Solve()
C++
const MPSolver::ResultStatus result_status = solver->Solve();
// Check that the problem has an optimal solution.
if (result_status != MPSolver::OPTIMAL) {
LOG(FATAL) << "The problem does not have an optimal solution!";
}
Java
final MPSolver.ResultStatus resultStatus = solver.solve();
C#
Solver.ResultStatus resultStatus = solver.Solve();
Çözümü görüntüleyin
Aşağıdaki kod çözümü gösterir.
Python
if status == pywraplp.Solver.OPTIMAL:
print("Solution:")
print("Objective value =", solver.Objective().Value())
print("x =", x.solution_value())
print("y =", y.solution_value())
else:
print("The problem does not have an optimal solution.")
C++
LOG(INFO) << "Solution:"; LOG(INFO) << "Objective value = " << objective->Value(); LOG(INFO) << "x = " << x->solution_value(); LOG(INFO) << "y = " << y->solution_value();
Java
if (resultStatus == MPSolver.ResultStatus.OPTIMAL) {
System.out.println("Solution:");
System.out.println("Objective value = " + objective.value());
System.out.println("x = " + x.solutionValue());
System.out.println("y = " + y.solutionValue());
} else {
System.err.println("The problem does not have an optimal solution!");
}
C#
// Check that the problem has an optimal solution.
if (resultStatus != Solver.ResultStatus.OPTIMAL)
{
Console.WriteLine("The problem does not have an optimal solution!");
return;
}
Console.WriteLine("Solution:");
Console.WriteLine("Objective value = " + solver.Objective().Value());
Console.WriteLine("x = " + x.SolutionValue());
Console.WriteLine("y = " + y.SolutionValue());
Sorunun çözümü.
Number of variables = 2 Number of constraints = 2 Solution: Objective value = 23 x = 3 y = 2
Hedef fonksiyonunun optimum değeri 23'tür. Bu değer, x = 3 y = 2 noktasında gerçekleşir.
Programları tamamlayın
Programların tamamını burada bulabilirsiniz.
Python
from ortools.linear_solver import pywraplp
def main():
# Create the mip solver with the SCIP backend.
solver = pywraplp.Solver.CreateSolver("SAT")
if not solver:
return
infinity = solver.infinity()
# x and y are integer non-negative variables.
x = solver.IntVar(0.0, infinity, "x")
y = solver.IntVar(0.0, infinity, "y")
print("Number of variables =", solver.NumVariables())
# x + 7 * y <= 17.5.
solver.Add(x + 7 * y <= 17.5)
# x <= 3.5.
solver.Add(x <= 3.5)
print("Number of constraints =", solver.NumConstraints())
# Maximize x + 10 * y.
solver.Maximize(x + 10 * y)
print(f"Solving with {solver.SolverVersion()}")
status = solver.Solve()
if status == pywraplp.Solver.OPTIMAL:
print("Solution:")
print("Objective value =", solver.Objective().Value())
print("x =", x.solution_value())
print("y =", y.solution_value())
else:
print("The problem does not have an optimal solution.")
print("\nAdvanced usage:")
print(f"Problem solved in {solver.wall_time():d} milliseconds")
print(f"Problem solved in {solver.iterations():d} iterations")
print(f"Problem solved in {solver.nodes():d} branch-and-bound nodes")
if __name__ == "__main__":
main()
C++
#include <memory>
#include "ortools/linear_solver/linear_solver.h"
namespace operations_research {
void SimpleMipProgram() {
// Create the mip solver with the SCIP backend.
std::unique_ptr<MPSolver> solver(MPSolver::CreateSolver("SCIP"));
if (!solver) {
LOG(WARNING) << "SCIP solver unavailable.";
return;
}
const double infinity = solver->infinity();
// x and y are integer non-negative variables.
MPVariable* const x = solver->MakeIntVar(0.0, infinity, "x");
MPVariable* const y = solver->MakeIntVar(0.0, infinity, "y");
LOG(INFO) << "Number of variables = " << solver->NumVariables();
// x + 7 * y <= 17.5.
MPConstraint* const c0 = solver->MakeRowConstraint(-infinity, 17.5, "c0");
c0->SetCoefficient(x, 1);
c0->SetCoefficient(y, 7);
// x <= 3.5.
MPConstraint* const c1 = solver->MakeRowConstraint(-infinity, 3.5, "c1");
c1->SetCoefficient(x, 1);
c1->SetCoefficient(y, 0);
LOG(INFO) << "Number of constraints = " << solver->NumConstraints();
// Maximize x + 10 * y.
MPObjective* const objective = solver->MutableObjective();
objective->SetCoefficient(x, 1);
objective->SetCoefficient(y, 10);
objective->SetMaximization();
const MPSolver::ResultStatus result_status = solver->Solve();
// Check that the problem has an optimal solution.
if (result_status != MPSolver::OPTIMAL) {
LOG(FATAL) << "The problem does not have an optimal solution!";
}
LOG(INFO) << "Solution:";
LOG(INFO) << "Objective value = " << objective->Value();
LOG(INFO) << "x = " << x->solution_value();
LOG(INFO) << "y = " << y->solution_value();
LOG(INFO) << "\nAdvanced usage:";
LOG(INFO) << "Problem solved in " << solver->wall_time() << " milliseconds";
LOG(INFO) << "Problem solved in " << solver->iterations() << " iterations";
LOG(INFO) << "Problem solved in " << solver->nodes()
<< " branch-and-bound nodes";
}
} // namespace operations_research
int main(int argc, char** argv) {
operations_research::SimpleMipProgram();
return EXIT_SUCCESS;
}
Java
package com.google.ortools.linearsolver.samples;
import com.google.ortools.Loader;
import com.google.ortools.linearsolver.MPConstraint;
import com.google.ortools.linearsolver.MPObjective;
import com.google.ortools.linearsolver.MPSolver;
import com.google.ortools.linearsolver.MPVariable;
/** Minimal Mixed Integer Programming example to showcase calling the solver. */
public final class SimpleMipProgram {
public static void main(String[] args) {
Loader.loadNativeLibraries();
// Create the linear solver with the SCIP backend.
MPSolver solver = MPSolver.createSolver("SCIP");
if (solver == null) {
System.out.println("Could not create solver SCIP");
return;
}
double infinity = java.lang.Double.POSITIVE_INFINITY;
// x and y are integer non-negative variables.
MPVariable x = solver.makeIntVar(0.0, infinity, "x");
MPVariable y = solver.makeIntVar(0.0, infinity, "y");
System.out.println("Number of variables = " + solver.numVariables());
// x + 7 * y <= 17.5.
MPConstraint c0 = solver.makeConstraint(-infinity, 17.5, "c0");
c0.setCoefficient(x, 1);
c0.setCoefficient(y, 7);
// x <= 3.5.
MPConstraint c1 = solver.makeConstraint(-infinity, 3.5, "c1");
c1.setCoefficient(x, 1);
c1.setCoefficient(y, 0);
System.out.println("Number of constraints = " + solver.numConstraints());
// Maximize x + 10 * y.
MPObjective objective = solver.objective();
objective.setCoefficient(x, 1);
objective.setCoefficient(y, 10);
objective.setMaximization();
final MPSolver.ResultStatus resultStatus = solver.solve();
if (resultStatus == MPSolver.ResultStatus.OPTIMAL) {
System.out.println("Solution:");
System.out.println("Objective value = " + objective.value());
System.out.println("x = " + x.solutionValue());
System.out.println("y = " + y.solutionValue());
} else {
System.err.println("The problem does not have an optimal solution!");
}
System.out.println("\nAdvanced usage:");
System.out.println("Problem solved in " + solver.wallTime() + " milliseconds");
System.out.println("Problem solved in " + solver.iterations() + " iterations");
System.out.println("Problem solved in " + solver.nodes() + " branch-and-bound nodes");
}
private SimpleMipProgram() {}
}
C#
using System;
using Google.OrTools.LinearSolver;
public class SimpleMipProgram
{
static void Main()
{
// Create the linear solver with the SCIP backend.
Solver solver = Solver.CreateSolver("SCIP");
if (solver is null)
{
return;
}
// x and y are integer non-negative variables.
Variable x = solver.MakeIntVar(0.0, double.PositiveInfinity, "x");
Variable y = solver.MakeIntVar(0.0, double.PositiveInfinity, "y");
Console.WriteLine("Number of variables = " + solver.NumVariables());
// x + 7 * y <= 17.5.
solver.Add(x + 7 * y <= 17.5);
// x <= 3.5.
solver.Add(x <= 3.5);
Console.WriteLine("Number of constraints = " + solver.NumConstraints());
// Maximize x + 10 * y.
solver.Maximize(x + 10 * y);
Solver.ResultStatus resultStatus = solver.Solve();
// Check that the problem has an optimal solution.
if (resultStatus != Solver.ResultStatus.OPTIMAL)
{
Console.WriteLine("The problem does not have an optimal solution!");
return;
}
Console.WriteLine("Solution:");
Console.WriteLine("Objective value = " + solver.Objective().Value());
Console.WriteLine("x = " + x.SolutionValue());
Console.WriteLine("y = " + y.SolutionValue());
Console.WriteLine("\nAdvanced usage:");
Console.WriteLine("Problem solved in " + solver.WallTime() + " milliseconds");
Console.WriteLine("Problem solved in " + solver.Iterations() + " iterations");
Console.WriteLine("Problem solved in " + solver.Nodes() + " branch-and-bound nodes");
}
}
Doğrusal ve Tam Sayı Optimizasyonu Karşılaştırması
Yukarıda gösterilen tamsayı optimizasyon probleminin çözümünü, tam sayı kısıtlamalarının kaldırıldığı ilgili doğrusal optimizasyon probleminin çözümüyle karşılaştıralım. Tam sayı probleminin çözümünün, doğrusal çözüme en yakın uygun bölgedeki (x = 0 noktası, y = 2 noktası) tam sayı noktası olacağını tahmin edebilirsiniz. Ancak göreceğiniz gibi, bu durum böyle değil.
Doğrusal problemi çözmek için, önceki bölümde yer alan programı aşağıdaki değişiklikleri yaparak kolayca değiştirebilirsiniz:
- MIP çözücüyü değiştirin
LP çözücüyle
Python
# Create the mip solver with the SCIP backend. solver = pywraplp.Solver.CreateSolver("SAT") if not solver: returnC++
// Create the mip solver with the SCIP backend. std::unique_ptr<MPSolver> solver(MPSolver::CreateSolver("SCIP")); if (!solver) { LOG(WARNING) << "SCIP solver unavailable."; return; }Java
// Create the linear solver with the SCIP backend. MPSolver solver = MPSolver.createSolver("SCIP"); if (solver == null) { System.out.println("Could not create solver SCIP"); return; }C#
// Create the linear solver with the SCIP backend. Solver solver = Solver.CreateSolver("SCIP"); if (solver is null) { return; }Python
# Create the linear solver with the GLOP backend. solver = pywraplp.Solver.CreateSolver("GLOP") if not solver: returnC++
// Create the linear solver with the GLOP backend. std::unique_ptr<MPSolver> solver(MPSolver::CreateSolver("GLOP"));Java
// Create the linear solver with the GLOP backend. MPSolver solver = MPSolver.createSolver("GLOP"); if (solver == null) { System.out.println("Could not create solver SCIP"); return; }C#
// Create the linear solver with the GLOP backend. Solver solver = Solver.CreateSolver("GLOP"); if (solver is null) { return; } - Tam sayı değişkenlerini değiştirme
sürekli değişkenlerle
Python
infinity = solver.infinity() # x and y are integer non-negative variables. x = solver.IntVar(0.0, infinity, "x") y = solver.IntVar(0.0, infinity, "y") print("Number of variables =", solver.NumVariables())C++
const double infinity = solver->infinity(); // x and y are integer non-negative variables. MPVariable* const x = solver->MakeIntVar(0.0, infinity, "x"); MPVariable* const y = solver->MakeIntVar(0.0, infinity, "y"); LOG(INFO) << "Number of variables = " << solver->NumVariables();
Java
double infinity = java.lang.Double.POSITIVE_INFINITY; // x and y are integer non-negative variables. MPVariable x = solver.makeIntVar(0.0, infinity, "x"); MPVariable y = solver.makeIntVar(0.0, infinity, "y"); System.out.println("Number of variables = " + solver.numVariables());C#
// x and y are integer non-negative variables. Variable x = solver.MakeIntVar(0.0, double.PositiveInfinity, "x"); Variable y = solver.MakeIntVar(0.0, double.PositiveInfinity, "y"); Console.WriteLine("Number of variables = " + solver.NumVariables());Python
infinity = solver.infinity() # Create the variables x and y. x = solver.NumVar(0.0, infinity, "x") y = solver.NumVar(0.0, infinity, "y") print("Number of variables =", solver.NumVariables())C++
const double infinity = solver->infinity(); // Create the variables x and y. MPVariable* const x = solver->MakeNumVar(0.0, infinity, "x"); MPVariable* const y = solver->MakeNumVar(0.0, infinity, "y"); LOG(INFO) << "Number of variables = " << solver->NumVariables();
Java
double infinity = java.lang.Double.POSITIVE_INFINITY; // Create the variables x and y. MPVariable x = solver.makeNumVar(0.0, infinity, "x"); MPVariable y = solver.makeNumVar(0.0, infinity, "y"); System.out.println("Number of variables = " + solver.numVariables());C#
// Create the variables x and y. Variable x = solver.MakeNumVar(0.0, double.PositiveInfinity, "x"); Variable y = solver.MakeNumVar(0.0, double.PositiveInfinity, "y"); Console.WriteLine("Number of variables = " + solver.NumVariables());
Bu değişiklikleri yaptıktan ve programı yeniden çalıştırdıktan sonra aşağıdaki çıkışı alırsınız:
Number of variables = 2 Number of constraints = 2 Objective value = 25.000000 x = 0.000000 y = 2.500000
Doğrusal problemin çözümü, hedef fonksiyonu 25'e eşit olan x = 0 y = 2.5 noktasında ortaya çıkar. Burada hem doğrusal hem de tam sayı problemlerinin
çözümlerini gösteren bir grafik görüyorsunuz.
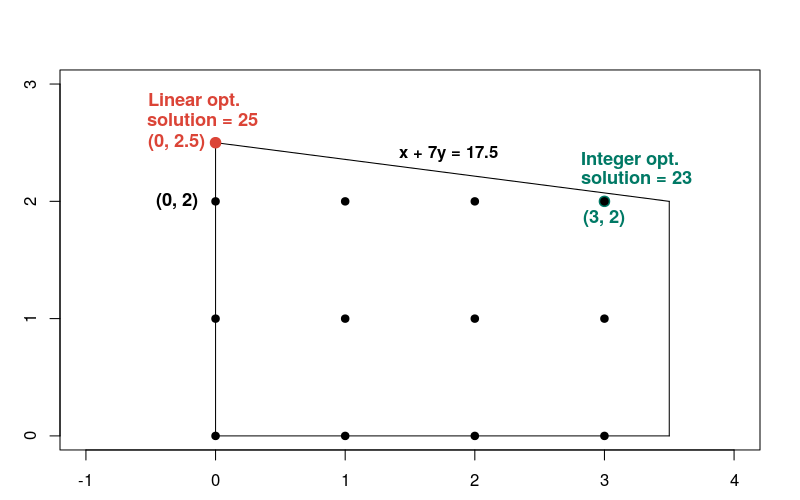
Tam sayı çözümünün, uygun bölgedeki diğer tam sayı noktalarının çoğuyla karşılaştırıldığında doğrusal çözüme yakın olmadığına dikkat edin. Genel olarak, doğrusal optimizasyon problemlerinin çözümleri ile bunlara karşılık gelen tam sayı optimizasyon problemleri birbirinden çok farklı olabilir. Bu nedenle, iki tür problemin çözümü farklı yöntemler gerektirir.