ה-Raw Depth API מספק נתוני עומק לתמונת מצלמה ברמת דיוק גבוהה יותר מנתוני Depth API מלאים, אבל לא תמיד מדובר בכל פיקסל. ניתן גם לבצע עיבוד נוסף של תמונות עומק גולמיות, יחד עם תמונות המהימנות התואמות שלהן, וכך לאפשר לאפליקציות להשתמש רק בנתוני עומק בעלי רמת דיוק גבוהה בתרחיש לדוגמה האישי שלהן.
אין לי מכשיר תואם
נתוני עומק גולמיים זמינים בכל המכשירים שתומכים ב-Depth API. ב-Raw Depth API, כמו ב-Depth API מלא, אין צורך בחיישן עומק נתמך של חומרה, כמו חיישן זמן טיסה (ToF). עם זאת, גם Raw Depth API וגם ה-Depth API המלא משתמשים בכל חיישני החומרה הנתמכים במכשיר.
Raw Depth API לעומת Full Depth API
Raw Depth API מספק הערכות עומק ברמת דיוק גבוהה יותר, אבל תמונות עומק גולמיות עשויות שלא לכלול הערכות עומק לכל הפיקסלים בתמונת המצלמה. לעומת זאת, Depth API מספק את העומק המשוער לכל פיקסל, אבל נתוני העומק לכל פיקסל עשויים להיות פחות מדויקים בגלל החלקה ואינטרפולציה של הערכות העומק. הפורמט והגודל של תמונות עומק זהים בשני ממשקי ה-API. רק התוכן שונה.
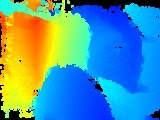
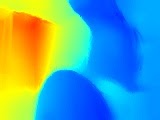
בטבלה הבאה ממחישים את ההבדלים בין Raw Depth API לבין ה-Depth API המלא באמצעות תמונה של כיסא ושולחן במטבח.
| API | החזרות | תמונת מצלמה | תמונת עומק | תמונה לקביעת מהימנות |
|---|---|---|---|---|
| API גולמי של עומק |
|

|
|

|
| API בעומק מלא |
|
|
|
לא רלוונטי |
תמונות מהימנות
בתמונות רווחיות שהוחזרו על ידי Raw Depth API, לפיקסלים בהירים יש ערכי סמך גבוהים יותר. פיקסלים לבנים מייצגים רמת ביטחון מלאה ופיקסלים שחורים מייצגים אי-ודאות. באופן כללי, לאזורים בתמונת המצלמה יש טקסטורה טובה יותר, כמו עץ, רמת המהימנות של עומק גולמי גבוהה יותר בהשוואה לאזורים שבהם אין, למשל קיר ריק. משטחים ללא טקסטורה מניב בדרך כלל רווח בר-סמך של אפס.
אם מכשיר היעד כולל חיישן עומק חומרה נתמך, סביר להניח שהאזורים בתמונה שנמצאים קרוב מספיק למצלמה יהיו טובים יותר, גם על משטחים ללא טקסטורה.
עלות המחשוב
עלות המחשוב של Raw Depth API היא כמחצית מעלות המחשוב של Depth API המלא.
תרחישים לדוגמה
באמצעות Raw Depth API אפשר לקבל תמונות עומק שמספקות ייצוג מפורט יותר של הגיאומטריה של האובייקטים בסצנה. נתוני עומק גולמיים יכולים להיות שימושיים כשיוצרים חוויות AR שבהן נדרשים פרטים מדויקים יותר ומפורטים יותר למשימות של הבנת גיאומטריה. תרחישים לדוגמה כוללים:
- שחזור בתלת ממד
- מדידה
- זיהוי צורות
דרישות מוקדמות
חשוב לוודא שאתם מבינים את המושגים הבסיסיים של AR ואיך להגדיר סשן ARCore לפני שממשיכים.
הפעלת העומק
בסשן ARCore חדש, בודקים אם המכשיר של המשתמש תומך ב'עומק'. חלק מהמכשירים שתואמים ל-ARCore לא תומכים ב-Depth API בגלל מגבלות כוח העיבוד. כדי לחסוך במשאבים, תכונת העומק מושבתת כברירת מחדל ב-ARCore. כדי שהאפליקציה תשתמש ב-Depth API, צריך להפעיל את מצב העומק.
int32_t is_depth_supported = 0; // Check whether the user's device supports the Depth API. ArSession_isDepthModeSupported(ar_session, AR_DEPTH_MODE_AUTOMATIC, &is_depth_supported); ArConfig* ar_config = NULL; ArConfig_create(ar_session, &ar_config); if (is_depth_supported) { ArConfig_setDepthMode(ar_session, ar_config, AR_DEPTH_MODE_AUTOMATIC); } CHECK(ArSession_configure(ar_session, ar_config) == AR_SUCCESS); ArConfig_destroy(ar_config);
קבלת תמונת העומק העדכנית ביותר
קוראים לפונקציה ArFrame_acquireRawDepthImage16Bits() כדי לקבל את תמונת העומק העדכנית ביותר.
int64_t previous_depth_image_timestamp_ns = -1; int64_t depth_image_timestamp_ns; ArImage* depth_image = NULL; // Acquire the raw depth image for the current frame. ArStatus acquire_image_status = ArFrame_acquireRawDepthImage16Bits(ar_session, ar_frame, &depth_image); if (acquire_image_status == AR_SUCCESS) { // Optional: compare raw depth image timestamps. Use this check if your app // uses only new depth data. ArImage_getTimestamp(ar_session, depth_image, &depth_image_timestamp_ns); if (depth_image_timestamp_ns != previous_depth_image_timestamp_ns) { // Raw depth image is based on new depth data. previous_depth_image_timestamp_ns = depth_image_timestamp_ns; // … } // Release the acquired image. ArImage_release(depth_image); }
חלק מהפיקסלים של התמונות שמוחזרים דרך ה-Raw Depth API לא מכילים נתוני עומק, ולא כל מסגרת ARCore תכיל תמונת עומק גולמית חדשה. כדי לקבוע אם תמונת העומק הגולמית של המסגרת הנוכחית היא חדשה, צריך להשוות את חותמת הזמן שלה לחותמת הזמן של תמונת העומק הגולמית הקודמת. אם חותמות הזמן שונות, תמונת העומק הגולמית מבוססת על נתוני עומק חדשים. אחרת, תמונת העומק היא היטל מחדש של נתוני העומק הקודמים.
קבלת תמונת הסמך העדכנית ביותר
קוראים אל ArFrame_acquireRawDepthConfidenceImage() כדי לקבל את תמונת הביטחון. אתם יכולים להשתמש בתמונה בר-הסמך כדי לבדוק את הדיוק של כל פיקסל עומק גולמי. תמונות סמך מוחזרות בפורמט Y8. כל פיקסל הוא מספר שלם לא חתום בגודל 8 ביט. 0 מציין את רמת הסמך הנמוכה ביותר, ואילו 255 מציין את רמת הסמך הגבוהה ביותר.
// Acquire the raw depth confidence image. ArImage* confidence_image = NULL; ArStatus acquire_image_status = ArFrame_acquireRawDepthConfidenceImage( ar_session, ar_frame, &confidence_image); if (acquire_image_status == AR_SUCCESS) { // … // Release the acquired image. ArImage_release(confidence_image); }