Tìm hiểu cách sử dụng API Ngữ nghĩa cảnh trong ứng dụng của riêng bạn.
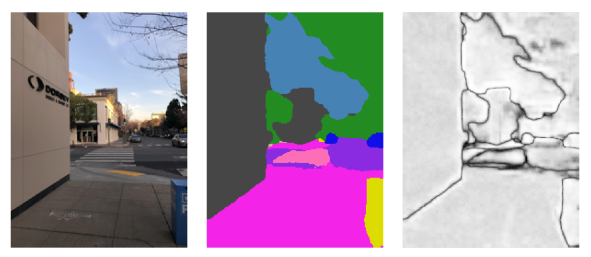
API Ngữ nghĩa cảnh cho phép nhà phát triển hiểu được cảnh xung quanh người dùng bằng cách cung cấp thông tin ngữ nghĩa theo thời gian thực dựa trên mô hình học máy. Khi nhận được hình ảnh của một cảnh ngoài trời, API sẽ trả về một nhãn cho mỗi pixel trong một tập hợp các lớp ngữ nghĩa hữu ích, chẳng hạn như bầu trời, toà nhà, cây, đường, vỉa hè, xe cộ, người và nhiều lớp khác. Ngoài nhãn pixel, API Ngữ nghĩa cảnh cũng cung cấp các giá trị độ tin cậy cho từng nhãn pixel và một cách dễ sử dụng để truy vấn mức độ phổ biến của một nhãn nhất định trong cảnh ngoài trời.
Từ trái sang phải, ví dụ về hình ảnh đầu vào, hình ảnh ngữ nghĩa của nhãn pixel và hình ảnh độ tin cậy tương ứng:
Điều kiện tiên quyết
Hãy đảm bảo rằng bạn hiểu các khái niệm cơ bản về AR và cách định cấu hình phiên ARCore trước khi tiếp tục.
Bật ngữ nghĩa cảnh
Trong một phiên ARCore mới, hãy kiểm tra xem thiết bị của người dùng có hỗ trợ API Scene Semantics hay không. Không phải thiết bị nào tương thích với ARCore cũng hỗ trợ API ngữ nghĩa cảnh do hạn chế về sức mạnh xử lý.
Để tiết kiệm tài nguyên, theo mặc định, bạn sẽ tắt tính năng Ngữ nghĩa cảnh trên ARCore. Bật chế độ ngữ nghĩa để ứng dụng của bạn sử dụng API Ngữ nghĩa cảnh.
GARSessionConfiguration *configuration = [[GARSessionConfiguration alloc] init];
if ([self.garSession isSemanticModeSupported:GARSemanticModeEnabled]) {
configuration.semanticMode = GARSemanticModeEnabled;
}
NSError *error;
[self.garSession setConfiguration:configuration error:&error];
Lấy hình ảnh ngữ nghĩa
Sau khi bật Scene Semantics, bạn có thể truy xuất hình ảnh ngữ nghĩa. Hình ảnh ngữ nghĩa là hình ảnh kCVPixelFormatType_OneComponent8, trong đó mỗi pixel tương ứng với một nhãn ngữ nghĩa do GARSemanticLabel xác định.
Sử dụng GARFrame.semanticImage để thu thập hình ảnh ngữ nghĩa:
CVPixelBuffer semanticImage = garFrame.semanticImage;
if (semanticImage) {
// Use the semantic image here
} else {
// Semantic images are not available.
// The output image may be missing for the first couple frames before the model has had a
// chance to run yet.
}
Hình ảnh ngữ nghĩa đầu ra sẽ xuất hiện sau khoảng 1-3 khung hình kể từ khi bắt đầu phiên, tuỳ thuộc vào thiết bị.
Lấy hình ảnh về độ tự tin
Ngoài hình ảnh ngữ nghĩa cung cấp nhãn cho mỗi điểm ảnh, API này cũng cung cấp hình ảnh độ tin cậy của các giá trị độ tin cậy điểm ảnh tương ứng. Hình ảnh độ tin cậy là hình ảnh kCVPixelFormatType_OneComponent8, trong đó mỗi pixel tương ứng với một giá trị trong phạm vi [0, 255], tương ứng với xác suất liên kết với nhãn ngữ nghĩa cho mỗi pixel.
Sử dụng GARFrame.semanticConfidenceImage để lấy hình ảnh về độ tin cậy ngữ nghĩa:
CVPixelBuffer confidenceImage = garFrame.semanticConfidenceImage;
if (confidenceImage) {
// Use the semantic image here
} else {
// Semantic images are not available.
// The output image may be missing for the first couple frames before the model has had a
// chance to run yet.
}
Hình ảnh độ tin cậy đầu ra sẽ xuất hiện sau khoảng 1-3 khung hình kể từ khi bắt đầu phiên, tuỳ thuộc vào thiết bị.
Truy vấn phân số pixel cho nhãn ngữ nghĩa
Bạn cũng có thể truy vấn tỷ lệ phần trăm pixel trong khung hình hiện tại thuộc một lớp cụ thể, chẳng hạn như bầu trời. Truy vấn này hiệu quả hơn so với việc trả về hình ảnh ngữ nghĩa và thực hiện tìm kiếm theo pixel cho một nhãn cụ thể. Phân số được trả về là một giá trị float trong phạm vi [0.0, 1.0].
Sử dụng fractionForSemanticLabel: để lấy phân số cho một nhãn nhất định:
// Ensure that semantic data is present for the GARFrame.
if (garFrame.semanticImage) {
float fraction = [garFrame fractionForSemanticLabel:GARSemanticLabelSky];
}