Pelajari cara menggunakan Scene Semantics API di aplikasi Anda sendiri.
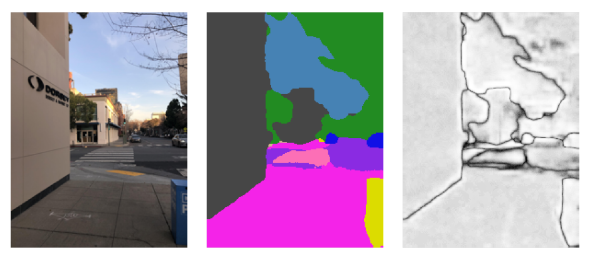
Scene Semantics API memungkinkan developer memahami scene di sekitar pengguna, dengan memberikan informasi semantik real-time berbasis model ML. Dengan gambar pemandangan luar ruangan, API akan menampilkan label untuk setiap piksel di seluruh kumpulan class semantik yang berguna, seperti langit, bangunan, pohon, jalan, trotoar, kendaraan, orang, dan lainnya. Selain label piksel, Scene Semantics API juga menawarkan nilai keyakinan untuk setiap label piksel dan cara yang mudah digunakan untuk membuat kueri prevalensi label tertentu di scene luar ruangan.
Dari kiri ke kanan, contoh gambar input, gambar semantik label piksel, dan gambar keyakinan yang sesuai:
Prasyarat
Pastikan Anda memahami konsep AR dasar dan cara mengonfigurasi sesi ARCore sebelum melanjutkan.
Mengaktifkan Scene Semantics
Dalam sesi ARCore baru, periksa apakah perangkat pengguna mendukung Scene Semantics API. Tidak semua perangkat yang kompatibel dengan ARCore mendukung Scene Semantics API karena keterbatasan daya pemrosesan.
Untuk menghemat resource, Scene Semantics dinonaktifkan secara default di ARCore. Aktifkan mode semantik agar aplikasi Anda menggunakan Scene Semantics API.
GARSessionConfiguration *configuration = [[GARSessionConfiguration alloc] init];
if ([self.garSession isSemanticModeSupported:GARSemanticModeEnabled]) {
configuration.semanticMode = GARSemanticModeEnabled;
}
NSError *error;
[self.garSession setConfiguration:configuration error:&error];
Mendapatkan gambar semantik
Setelah Semantik Scene diaktifkan, gambar semantik dapat diambil. Gambar semantik adalah gambar kCVPixelFormatType_OneComponent8, dengan setiap piksel sesuai dengan label semantik yang ditentukan oleh GARSemanticLabel.
Gunakan GARFrame.semanticImage untuk mendapatkan gambar semantik:
CVPixelBuffer semanticImage = garFrame.semanticImage;
if (semanticImage) {
// Use the semantic image here
} else {
// Semantic images are not available.
// The output image may be missing for the first couple frames before the model has had a
// chance to run yet.
}
Gambar semantik output akan tersedia setelah sekitar 1-3 frame dari awal sesi, bergantung pada perangkat.
Mendapatkan gambar keyakinan
Selain gambar semantik, yang memberikan label untuk setiap piksel, API juga memberikan gambar keyakinan dari nilai keyakinan piksel yang sesuai. Gambar keyakinan adalah gambar kCVPixelFormatType_OneComponent8, dengan setiap piksel sesuai dengan nilai dalam rentang [0, 255], yang sesuai dengan probabilitas yang terkait dengan label semantik untuk setiap piksel.
Gunakan GARFrame.semanticConfidenceImage untuk mendapatkan gambar keyakinan semantik:
CVPixelBuffer confidenceImage = garFrame.semanticConfidenceImage;
if (confidenceImage) {
// Use the semantic image here
} else {
// Semantic images are not available.
// The output image may be missing for the first couple frames before the model has had a
// chance to run yet.
}
Gambar keyakinan output akan tersedia setelah sekitar 1-3 frame dari awal sesi, bergantung pada perangkat.
Membuat kueri fraksi piksel untuk label semantik
Anda juga dapat membuat kueri fraksi piksel dalam frame saat ini yang termasuk dalam class tertentu, seperti langit. Kueri ini lebih efisien daripada menampilkan gambar semantik dan melakukan penelusuran per piksel untuk label tertentu. Fraksi yang ditampilkan adalah nilai float dalam rentang [0.0, 1.0].
Gunakan fractionForSemanticLabel: untuk mendapatkan fraksi untuk label tertentu:
// Ensure that semantic data is present for the GARFrame.
if (garFrame.semanticImage) {
float fraction = [garFrame fractionForSemanticLabel:GARSemanticLabelSky];
}