หมุดตำแหน่งทางภูมิศาสตร์เป็นหมุดประเภทหนึ่งที่ให้คุณวางเนื้อหา 3 มิติในโลกแห่งความเป็นจริงได้
ประเภทของหมุดยึดเชิงพื้นที่
หมุดยึดเชิงพื้นที่มี 3 ประเภท ซึ่งแต่ละประเภทจัดการระดับความสูงแตกต่างกันไป ดังนี้
หมุด WGS84:
หมุด WGS84 ช่วยให้คุณวางเนื้อหา 3 มิติที่ละติจูด ลองจิจูด และระดับความสูงที่ต้องการได้หมุดเทอร์เรน:
หมุดเทอร์เรนช่วยให้คุณวางเนื้อหาได้โดยใช้เพียงละติจูดและลองจิจูดที่มีความสูงสัมพันธ์กับภูมิประเทศ ณ ตำแหน่งนั้น ระดับความสูงจะกำหนดตามพื้นดินหรือพื้นตามที่ VPS ทราบจุดยึดบนชั้นดาดฟ้า:
จุดยึดบนชั้นดาดฟ้าช่วยให้คุณวางเนื้อหาได้โดยใช้เฉพาะละติจูดและลองจิจูดที่มีความสูงสัมพันธ์กับชั้นดาดฟ้าของอาคาร ณ ตําแหน่งนั้น ระดับความสูงจะกำหนดตามยอดอาคารตามที่เรขาคณิตของสภาพแวดล้อมบนท้องถนนทราบ ซึ่งจะมีค่าเริ่มต้นเป็นระดับความสูงของภูมิประเทศเมื่อไม่ได้วางไว้บนอาคาร
| WGS84 | ภูมิประเทศ | ดาดฟ้า | |
|---|---|---|---|
| ตำแหน่งแนวนอน | ละติจูด ลองจิจูด | ละติจูด ลองจิจูด | ละติจูด ลองจิจูด |
| ตำแหน่งแนวตั้ง | สัมพัทธ์กับความสูง WGS84 | สัมพันธ์กับระดับภูมิประเทศที่ Google Maps กำหนด | สัมพันธ์กับระดับดาดฟ้าที่ Google Maps ระบุ |
| ต้องได้รับการแก้ไขจากเซิร์ฟเวอร์ไหม | ไม่ | ได้ | ใช่ |
ข้อกำหนดเบื้องต้น
โปรดตรวจสอบว่าคุณได้เปิดใช้ Geospatial API แล้วก่อนดำเนินการต่อ
วางหมุดภูมิสารสนเทศ
หมุดแต่ละประเภทมี API เฉพาะสำหรับสร้าง โปรดดูข้อมูลเพิ่มเติมที่ประเภทของหมุดพิกัดภูมิศาสตร์
สร้างจุดยึดจากการทดสอบการคลิก
นอกจากนี้ คุณยังสร้างหมุดตำแหน่งทางภูมิศาสตร์จากผลการทดสอบ Hit Test ได้ด้วย
ใช้ท่าทางจาก Hit-Test และแปลงเป็น ArGeospatialPose ใช้เพื่อวางจุดยึด 1 ใน 3 ประเภทที่อธิบายไว้
รับท่าทางภูมิสารสนเทศจากท่าทาง AR
ArEarth_getGeospatialPose() มีวิธีเพิ่มเติมในการระบุละติจูดและลองจิจูดโดยการแปลงท่าทาง AR เป็นท่าทางภูมิสารสนเทศ
รับท่าทาง AR จากท่าทางภูมิสารสนเทศ
ArEarth_getPose() จะแปลงตำแหน่งแนวนอน ระดับความสูง และการหมุนควอร์เทอร์ไบน์ที่ระบุโดยโลกตามกรอบพิกัดตะวันออก-ขึ้น-ใต้เป็นท่าทาง AR ตามพิกัดโลก GL
เลือกวิธีการที่เหมาะกับกรณีการใช้งานของคุณ
การสร้างหมุดแต่ละวิธีมีข้อดีข้อเสียที่ควรทราบดังนี้
- เมื่อใช้เรขาคณิตของภาพถนน ให้ใช้ Hit-Test เพื่อแนบเนื้อหากับอาคาร
- แนะนำให้ใช้จุดยึดบนพื้นดินหรือบนหลังคาแทนจุดยึด WGS84 เนื่องจากใช้ค่าระดับความสูงที่ Google Maps กำหนด
ระบุละติจูดและลองจิจูดของสถานที่
คุณสามารถคํานวณละติจูดและลองจิจูดของสถานที่ได้ 3 วิธีดังนี้
- ใช้ Geospatial Creator เพื่อดูและเพิ่มประสิทธิภาพโลกด้วยเนื้อหา 3 มิติโดยไม่ต้องไปที่สถานที่จริง ซึ่งช่วยให้คุณวางเนื้อหา 3 มิติที่สมจริงได้โดยใช้ภาพจาก Google Maps ใน Unity Editor ระบบจะคำนวณละติจูด ลองจิจูด การหมุน และระดับความสูงของเนื้อหาให้คุณโดยอัตโนมัติ
- ใช้ Google Maps
- ใช้ Google Earth โปรดทราบว่าการหาพิกัดเหล่านี้โดยใช้ Google Earth แทน Google Maps จะมีความคลาดเคลื่อนได้สูงสุดหลายเมตร
- ไปที่สถานที่ตั้งจริง
ใช้ Google Maps
วิธีรับละติจูดและลองจิจูดของสถานที่โดยใช้ Google Maps
ไปที่ Google Maps ในคอมพิวเตอร์เดสก์ท็อป
ไปที่เลเยอร์ > เพิ่มเติม
เปลี่ยนประเภทแผนที่เป็นดาวเทียม แล้วยกเลิกการเลือกช่องทำเครื่องหมายมุมมองโลกที่มุมซ้ายล่างของหน้าจอ
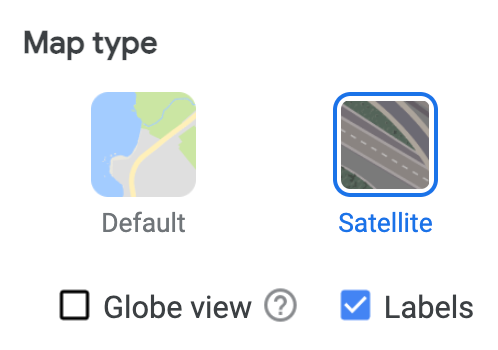
ซึ่งจะบังคับใช้มุมมอง 2 มิติและขจัดข้อผิดพลาดที่อาจเกิดขึ้นจากมุมมอง 3 มิติที่เอียง
คลิกขวาที่ตำแหน่งในแผนที่ แล้วเลือกลองจิจูด/ละติจูดเพื่อคัดลอกไปยังคลิปบอร์ด
ใช้ Google Earth
คุณสามารถคํานวณละติจูดและลองจิจูดของสถานที่จาก Google Earth ได้โดยคลิกสถานที่ใน UI และอ่านข้อมูลจากรายละเอียดจุดสังเกต
วิธีรับละติจูดและลองจิจูดของสถานที่โดยใช้ Google Earth
ไปที่ Google Earth ในคอมพิวเตอร์เดสก์ท็อป
ไปที่เมนูแฮมเบอร์เกอร์
 แล้วเลือกรูปแบบแผนที่
แล้วเลือกรูปแบบแผนที่สลับสวิตช์สิ่งปลูกสร้าง 3 มิติเป็นปิด
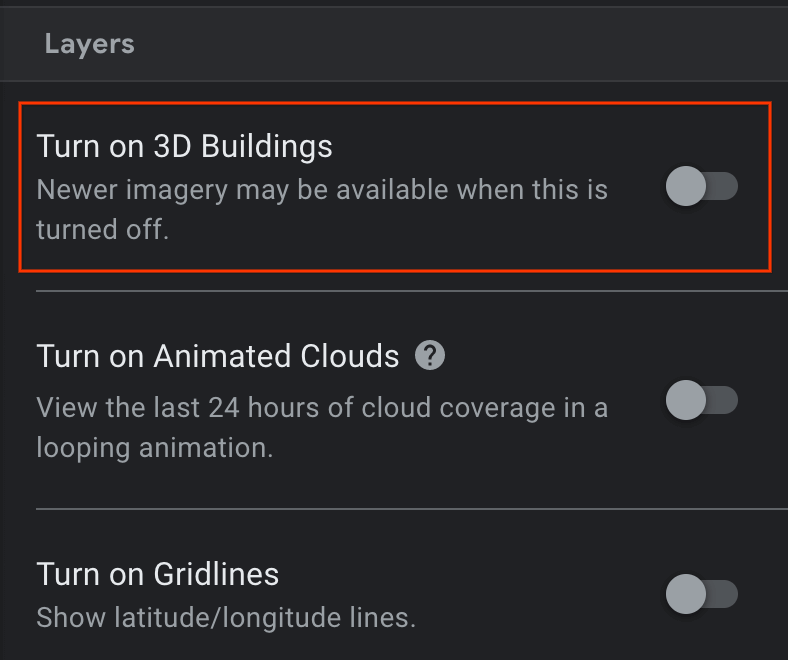
เมื่อปิดสวิตช์อาคาร 3 มิติแล้ว ให้คลิกไอคอนหมุด
 เพื่อเพิ่มหมุดหมาย ณ ตำแหน่งที่เลือก
เพื่อเพิ่มหมุดหมาย ณ ตำแหน่งที่เลือกระบุโปรเจ็กต์ที่จะใส่หมุด แล้วคลิกบันทึก
ป้อนชื่อหมุดในช่องชื่อของหมุด
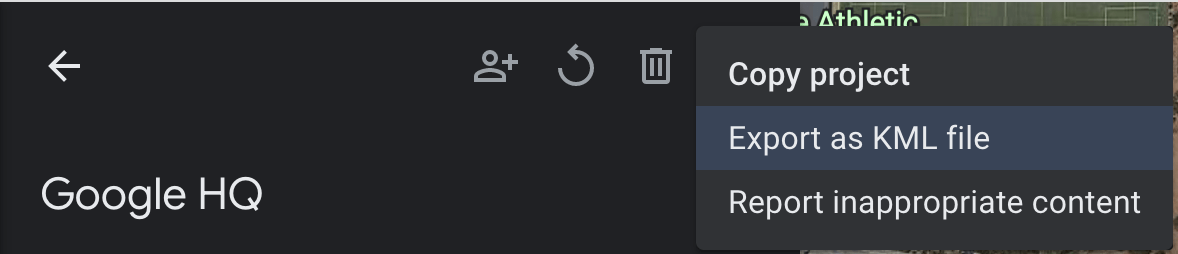
คลิกลูกศรย้อนกลับ
 ในแผงโปรเจ็กต์ แล้วเลือกเมนู
ในแผงโปรเจ็กต์ แล้วเลือกเมนู  การดำเนินการเพิ่มเติม
การดำเนินการเพิ่มเติมเลือกส่งออกเป็นไฟล์ KML จากเมนู
ไฟล์ KLM จะรายงานละติจูด ลองจิจูด และระดับความสูงของจุดสังเกตในแท็ก <coordinates> โดยคั่นด้วยคอมมา ดังนี้
<coordinates>-122.0755182435043,37.41347299422944,7.420342565583832</coordinates>
อย่าใช้ละติจูดและลองจิจูดจากแท็ก <LookAt> ซึ่งระบุตำแหน่งของกล้อง ไม่ใช่ตำแหน่ง
ไปที่สถานที่ตั้งจริง
คุณสามารถคำนวณระดับความสูงของสถานที่ได้โดยไปที่สถานที่นั้นและทำการสังเกตการณ์ในพื้นที่
รับควอร์เทอร์ไบน์การหมุน
ArGeospatialPose_getEastUpSouthQuaternion() ดึงข้อมูลการวางแนวจากท่าทางเชิงพื้นที่และแสดงผลควอร์เทอร์ไบน์ที่แสดงถึงเมทริกซ์การหมุนที่เปลี่ยนเวกเตอร์จากเป้าหมายไปยังระบบพิกัดตะวันออก-ขึ้น-ใต้ (EUS) X+ จะชี้ไปทางตะวันออก Y+ จะชี้ขึ้น และ Z+ จะชี้ไปทางใต้ ค่าจะเขียนตามลําดับ {x, y, z, w}
จุดยึด WGS84
หมุด WGS84 คือหมุดประเภทหนึ่งที่ให้คุณวางเนื้อหา 3 มิติที่ละติจูด ลองจิจูด และระดับความสูงใดก็ได้ โดยอาศัยการวางท่าและการวางแนวเพื่อวางตำแหน่งในโลกแห่งความเป็นจริง ตำแหน่งประกอบด้วยละติจูด ลองจิจูด และระดับความสูง ซึ่งระบุไว้ในระบบพิกัด WGS84 การวางแนวประกอบด้วยการหมุนควอร์เทอร์ไบน์
ระบบจะรายงานระดับความสูงเป็นเมตรเหนือทรงกลม WGS84 อ้างอิงเพื่อให้ระดับพื้นดินไม่ใช่ 0 แอปของคุณมีหน้าที่รับผิดชอบในการจัดหาพิกัดเหล่านี้สำหรับจุดยึดแต่ละจุดที่สร้าง
วางหมุด WGS84 ในโลกแห่งความเป็นจริง
ระบุระดับความสูงของสถานที่
การกำหนดระดับความสูงของสถานที่เพื่อวางจุดยึดทำได้หลายวิธี ดังนี้
- หากตำแหน่งของจุดยึดอยู่ใกล้กับผู้ใช้ คุณสามารถใช้ระดับความสูงที่คล้ายกับระดับความสูงของอุปกรณ์ของผู้ใช้
- เมื่อทราบละติจูดและลองจิจูดแล้ว ให้ใช้ Elevation API เพื่อรับระดับความสูงตามข้อกำหนด EGM96 คุณต้องแปลงระดับความสูง EGM96 ของ Maps API เป็น WGS84 เพื่อเปรียบเทียบกับระดับความสูง
ArGeospatialPoseดู GeoidEval ที่มีทั้งบรรทัดคำสั่งและอินเทอร์เฟซ HTML Maps API จะรายงานละติจูดและลองจิจูดตามข้อกำหนด WGS84 โดยค่าเริ่มต้น - คุณดูละติจูด ลองจิจูด และระดับความสูงของสถานที่ได้จาก Google Earth ซึ่งจะทำให้คุณมีข้อผิดพลาดได้สูงสุดหลายเมตร ใช้ละติจูด ลองจิจูด และระดับความสูงจากแท็ก
<coordinates>ไม่ใช่แท็ก<LookAt>ในไฟล์ KML - หากจุดยึดที่มีอยู่อยู่ใกล้และถ้าคุณไม่ได้อยู่บนแนวเอียง คุณอาจใช้ระดับความสูงจาก
ArGeospatialPoseของกล้อง โดยไม่ต้องใช้แหล่งข้อมูลอื่น เช่น Maps API
สร้าง Anchor
เมื่อคุณมีละติจูด ลองจิจูด ความสูง และควอร์เทอร์ไบน์ของการหมุนแล้ว ให้ใช้ ArEarth_acquireNewAnchor()
เพื่อกำหนดตำแหน่งเนื้อหาตามพิกัดทางภูมิศาสตร์ที่คุณระบุ
float eus_quaternion_4[4] = {qx, qy, qz, qw}; if (ar_earth != NULL) { ArTrackingState earth_tracking_state = AR_TRACKING_STATE_STOPPED; ArTrackable_getTrackingState(ar_session, (ArTrackable*)ar_earth, &earth_tracking_state); if (earth_tracking_state == AR_TRACKING_STATE_TRACKING) { ArAnchor* earth_anchor = NULL; ArStatus status = ArEarth_acquireNewAnchor(ar_session, ar_earth, /* location values */ latitude, longitude, altitude, eus_quaternion_4, &earth_anchor); // Attach content to the anchor specified by geodetic location and // pose. } }
จุดยึดภูมิประเทศ
จุดยึดตามภูมิประเทศเป็นจุดยึดประเภทหนึ่งที่ให้คุณวางวัตถุ AR ได้โดยใช้เฉพาะละติจูดและลองจิจูด โดยใช้ประโยชน์จากข้อมูลจาก VPS เพื่อค้นหาระดับความสูงจากพื้นดินที่แม่นยำ
คุณต้องระบุระดับความสูงเหนือภูมิประเทศแทนการป้อนระดับความสูงที่ต้องการ เมื่อค่านี้เป็น 0 หมุดยึดจะอยู่ในระดับเดียวกับภูมิประเทศ
ตั้งค่าโหมดการค้นหาเครื่องบิน
การค้นหาเครื่องบินเป็นตัวเลือกที่ไม่บังคับและไม่จำเป็นต้องใช้หมุดยึด โปรดทราบว่าระบบจะใช้เฉพาะระนาบแนวนอน ระนาบแนวนอนจะช่วยจัดแนวหมุดยึดภูมิประเทศบนพื้นดินแบบไดนามิก
ใช้ ArPlaneFindingMode เพื่อเลือกวิธีที่แอปจะตรวจหาเครื่องบิน
สร้างหมุดเทอร์เรนโดยใช้ Async API ใหม่
หากต้องการสร้างและวางจุดยึดภูมิประเทศ ให้กด ArEarth_resolveAnchorOnTerrainAsync()
หมุดจะไม่พร้อมใช้งานในทันทีและจำเป็นต้องแก้ไข เมื่อแก้ไขแล้ว รายการดังกล่าวจะพร้อมใช้งานใน ArResolveAnchorOnTerrainFuture
ตรวจสอบสถานะจุดยึดของภูมิประเทศโดยใช้ ArResolveAnchorOnTerrainFuture_getResultTerrainAnchorState()
รับหมุดที่แก้ไขแล้วโดยใช้ ArResolveAnchorOnTerrainFuture_acquireResultAnchor()
float eus_quaternion_4[4] = {qx, qy, qz, qw}; void* context = NULL; ArResolveAnchorOnTerrainCallback callback = NULL; ArResolveAnchorOnTerrainFuture* future = NULL; if (ar_earth != NULL) { ArTrackingState earth_tracking_state = AR_TRACKING_STATE_STOPPED; ArTrackable_getTrackingState(ar_session, (ArTrackable*)ar_earth, &earth_tracking_state); if (earth_tracking_state == AR_TRACKING_STATE_TRACKING) { ArStatus status = ArEarth_resolveAnchorOnTerrainAsync( ar_session, ar_earth, /* location values */ latitude, longitude, altitude_above_terrain, eus_quaternion_4, context, callback, &future); } }
ดู "สถานะของอนาคต"
อนาคตจะมี ArFutureState ที่เชื่อมโยงอยู่
| รัฐ | คำอธิบาย |
|---|---|
AR_FUTURE_STATE_PENDING |
การดำเนินการยังอยู่ระหว่างรอดำเนินการ |
AR_FUTURE_STATE_DONE |
การดำเนินการเสร็จสมบูรณ์และผลลัพธ์พร้อมใช้งาน |
AR_FUTURE_STATE_CANCELLED |
การดำเนินการถูกยกเลิกแล้ว |
ตรวจสอบสถานะการยึดตามภูมิประเทศของผลลัพธ์ในอนาคต
ArTerrainAnchorState เป็นของการดำเนินการแบบไม่พร้อมกันและเป็นส่วนหนึ่งของผลลัพธ์สุดท้ายในอนาคต
switch (terrain_anchor_state) { case AR_TERRAIN_ANCHOR_STATE_SUCCESS: // A resolving task for this anchor has been successfully resolved. break; case AR_TERRAIN_ANCHOR_STATE_ERROR_UNSUPPORTED_LOCATION: // The requested anchor is in a location that isn't supported by the // Geospatial API. break; case AR_TERRAIN_ANCHOR_STATE_ERROR_NOT_AUTHORIZED: // An error occurred while authorizing your app with the ARCore API. See // https://developers.google.com/ar/reference/c/group/ar-anchor#:~:text=from%20this%20error.-,AR_TERRAIN_ANCHOR_STATE_ERROR_NOT_AUTHORIZED,-The%20authorization%20provided // for troubleshooting steps. break; case AR_TERRAIN_ANCHOR_STATE_ERROR_INTERNAL: // The Terrain anchor could not be resolved due to an internal error. break; default: break; }
หมุดยึดบนหลังคา

จุดยึดบนหลังคาเป็นจุดยึดประเภทหนึ่งและคล้ายกับจุดยึดบนพื้นด้านบนมาก ความแตกต่างคือคุณจะต้องระบุระดับความสูงเหนือดาดฟ้าแทนระดับความสูงเหนือภูมิประเทศ
สร้างหมุดบนหลังคาโดยใช้ Async API ใหม่
หมุดจะไม่พร้อมใช้งานในทันทีและจำเป็นต้องแก้ไข
หากต้องการสร้างและวางหมุดยึดบนหลังคา ให้โทรหา ArEarth_resolveAnchorOnRooftopAsync() คุณจะเข้าถึง ArFutureState ของอนาคตได้ด้วย ซึ่งคล้ายกับจุดยึดของภูมิประเทศ จากนั้นตรวจสอบผลลัพธ์ในอนาคตเพื่อเข้าถึง ArRooftopAnchorState
ใช้ ArEarth_resolveAnchorOnRooftopAsync() เพื่อสร้าง ArResolveAnchorOnRooftopFuture
ตรวจสอบสถานะจุดยึดบนหลังคาโดยใช้ ArResolveAnchorOnRooftopFuture_getResultRooftopAnchorState()
รับหมุดที่แก้ไขแล้วโดยใช้ ArResolveAnchorOnRooftopFuture_acquireResultAnchor()
float eus_quaternion_4[4] = {qx, qy, qz, qw}; void* context = NULL; ArResolveAnchorOnRooftopCallback callback = NULL; ArResolveAnchorOnRooftopFuture* future = NULL; if (ar_earth != NULL) { ArTrackingState earth_tracking_state = AR_TRACKING_STATE_STOPPED; ArTrackable_getTrackingState(ar_session, (ArTrackable*)ar_earth, &earth_tracking_state); if (earth_tracking_state == AR_TRACKING_STATE_TRACKING) { ArStatus status = ArEarth_resolveAnchorOnRooftopAsync( ar_session, ar_earth, /* location values */ latitude, longitude, altitude_above_rooftop, eus_quaternion_4, context, callback, &future); } }
ดู "สถานะของอนาคต"
อนาคตจะมี ArFutureState ที่เชื่อมโยงกัน โปรดดูตารางด้านบน
ตรวจสอบสถานะการยึดบนหลังคาของผลลัพธ์ในอนาคต
ArRooftopAnchorState เป็นของการดำเนินการแบบไม่พร้อมกันและเป็นส่วนหนึ่งของผลลัพธ์สุดท้ายในอนาคต
switch (rooftop_anchor_state) { case AR_ROOFTOP_ANCHOR_STATE_SUCCESS: // A resolving task for this anchor has been successfully resolved. break; case AR_ROOFTOP_ANCHOR_STATE_ERROR_UNSUPPORTED_LOCATION: // The requested anchor is in a location that isn't supported by the // Geospatial API. break; case AR_ROOFTOP_ANCHOR_STATE_ERROR_NOT_AUTHORIZED: // An error occurred while authorizing your app with the ARCore API. See // https://developers.google.com/ar/reference/c/group/ar-anchor#:~:text=from%20this%20error.-,AR_ROOFTOP_ANCHOR_STATE_ERROR_NOT_AUTHORIZED,-The%20authorization%20provided // for troubleshooting steps. break; case AR_ROOFTOP_ANCHOR_STATE_ERROR_INTERNAL: // The Rooftop anchor could not be resolved due to an internal error. break; default: break; }
ขั้นตอนถัดไป
- ตรวจสอบว่าคุณเข้าใจโควต้าการใช้งาน API เชิงพื้นที่