Raw Depth API 會為相機圖片提供深度資料,其準確度高於完整 Depth API 資料,但不一定涵蓋每個像素。原始深度圖片和相符的信心圖片也可以進一步處理,讓應用程式只使用深度資料,以便在個別用途中達到足夠的準確度。
裝置相容性
所有支援 Depth API 的裝置皆可使用原始深度。Raw Depth API 和完整 Depth API 一樣,不需要支援的硬體深度感應器,例如飛行時間 (ToF) 感應器。不過,Raw Depth API 和完整 Depth API 都會使用裝置可能具備的任何支援硬體感應器。
原始深度 API 與完整深度 API
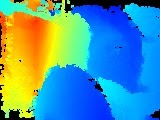
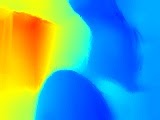
Raw Depth API 可提供更精確的深度估計值,但原始深度圖片可能不會包含相機圖片中所有像素的深度估計值。相較之下,完整的 Depth API 會為每個像素提供預估深度,但由於深度預估值會經過平滑處理和內插,因此每個像素的深度資料可能較不準確。兩個 API 的深度圖片格式和大小相同。只有內容不同。
下表說明使用廚房內椅子和桌子的圖片,Raw Depth API 和完整 Depth API 之間的差異。
| API | 傳回 | 相機圖片 | 深度圖像 | 可信度圖片 |
|---|---|---|---|---|
| Raw Depth API |
|

|
|

|
| Full Depth API |
|
|
|
無 |
信心圖片
在 Raw Depth API 傳回的信心圖像中,較亮的像素具有較高的信心值,白色像素代表完全有信心,黑色像素代表完全沒有信心。一般來說,相機影像中紋理較多的區域 (例如樹木) 比紋理較少的區域 (例如空白牆壁) 具有較高的原始深度信心。沒有紋理的表面通常會產生零信心。
如果目標裝置有支援的硬體深度感應器,即使在無紋理表面上,系統也可能會更有信心地判斷相機附近的圖像區域。
運算費用
Raw Depth API 的運算成本約為完整 Depth API 的半數。
用途
您可以使用 Raw Depth API 取得深度圖片,以便更詳細地呈現場景中物件的幾何圖形。在創建 AR 體驗時,如果需要在幾何形狀理解工作中提高深度準確度和細節,原始深度資料就會很實用。部分用途包括:
- 3D 重建
- 評估
- 形狀偵測
必要條件
請務必先瞭解基本 AR 概念,並瞭解如何設定 ARCore 工作階段,再繼續操作。
啟用深度
在新的 ARCore 工作階段中,確認使用者的裝置是否支援 Depth。由於處理效能受限,並非所有 ARCore 相容裝置都支援 Depth API。為了節省資源,ARCore 預設會停用深度功能。啟用深度模式,讓應用程式使用 Depth API。
var occlusionManager = // Typically acquired from the Camera game object.
// Check whether the user's device supports the Depth API.
if (occlusionManager.descriptor?.supportsEnvironmentDepthImage)
{
// If depth mode is available on the user's device, perform
// the steps you want here.
}
取得最新的原始深度影像
呼叫 AROcclusionManager.TryAcquireEnvironmentDepthCpuImage() 並使用 AROcclusionManager.environmentDepthTemporalSmoothingRequested,即可在 CPU 上取得最新的原始深度圖像。
取得最新的原始深度信心圖片
呼叫 AROcclusionManager.TryAcquireEnvironmentDepthConfidenceCpuImage() 並使用 AROcclusionManager.environmentDepthTemporalSmoothingRequested 在 CPU 上取得信心圖片。
// Attempt to get the latest environment depth image.
if (occlusionManager && occlusionManager.TryAcquireEnvironmentDepthConfidenceCpuImage(out XRCpuImage image))
{
using (image)
{
UpdateRawImage(m_RawEnvironmentDepthConfidenceImage, image);
}
}
else
{
m_RawEnvironmentDepthConfidenceImage.enabled = false;
}