Depth API (API Chiều sâu) giúp camera trên thiết bị hiểu được kích thước và hình dạng của các đối tượng thực trong một cảnh. Tính năng này sử dụng camera để tạo hình ảnh chiều sâu hay bản đồ độ sâu, do đó thêm một lớp hiện thực AR vào ứng dụng của bạn. Bạn có thể sử dụng thông tin do hình ảnh chiều sâu cung cấp để làm cho các đối tượng ảo xuất hiện chính xác ở phía trước hoặc phía sau các đối tượng trong thế giới thực, nhờ đó mang lại trải nghiệm sống động và chân thực cho người dùng.
Thông tin về độ sâu được tính toán từ chuyển động và có thể được kết hợp với thông tin từ cảm biến độ sâu phần cứng, chẳng hạn như cảm biến thời gian bay (ToF), nếu có. Thiết bị không cần có cảm biến ToF để hỗ trợ depth API.
Điều kiện tiên quyết
Đảm bảo rằng bạn hiểu rõ các khái niệm cơ bản về AR và cách định cấu hình phiên ARCore trước khi tiếp tục.
Chỉ cho phép những thiết bị hỗ trợ tính năng Chiều sâu
Nếu ứng dụng của bạn cần hỗ trợ API Độ sâu, do một phần cốt lõi của
Trải nghiệm thực tế tăng cường phụ thuộc vào chiều sâu hoặc do không có phương án dự phòng phù hợp cho
cho các phần của ứng dụng sử dụng chiều sâu, bạn có thể chọn hạn chế phân phối
trong Cửa hàng Google Play để
những thiết bị hỗ trợ depth API bằng cách thêm
dòng sau vào AndroidManifest.xml của bạn, ngoài việc
AndroidManifest.xml thay đổi được mô tả trong
Hướng dẫn Bật ARCore:
<uses-feature android:name="com.google.ar.core.depth" />
Bật tính năng Chiều sâu
Trong phiên ARCore mới, hãy kiểm tra xem thiết bị của người dùng có hỗ trợ Chiều sâu hay không. Không phải thiết bị nào tương thích với ARCore cũng hỗ trợ depth API do những hạn chế về công suất xử lý. Để tiết kiệm tài nguyên, theo mặc định, độ sâu sẽ bị tắt trên ARCore. Bật chế độ chiều sâu để ứng dụng sử dụng depth API.
// Check whether the user's device supports the Depth API. int32_t is_depth_supported = 0; ArSession_isDepthModeSupported(ar_session, AR_DEPTH_MODE_AUTOMATIC, &is_depth_supported); // Configure the session for AR_DEPTH_MODE_AUTOMATIC. ArConfig* ar_config = NULL; ArConfig_create(ar_session, &ar_config); if (is_depth_supported) { ArConfig_setDepthMode(ar_session, ar_config, AR_DEPTH_MODE_AUTOMATIC); } CHECK(ArSession_configure(ar_session, ar_config) == AR_SUCCESS); ArConfig_destroy(ar_config);
Thu thập hình ảnh có chiều sâu
Gọi ArFrame_acquireDepthImage16Bits() để lấy hình ảnh chiều sâu cho khung hình hiện tại.
// Retrieve the depth image for the current frame, if available. ArImage* depth_image = NULL; // If a depth image is available, use it here. if (ArFrame_acquireDepthImage16Bits(ar_session, ar_frame, &depth_image) != AR_SUCCESS) { // No depth image received for this frame. // This normally means that depth data is not available yet. // Depth data will not be available if there are no tracked // feature points. This can happen when there is no motion, or when the // camera loses its ability to track objects in the surrounding // environment. return; }
Hình ảnh được trả về cung cấp vùng đệm hình ảnh thô. Vùng đệm này có thể được truyền đến chương trình đổ bóng mảnh để sử dụng trên GPU cho từng đối tượng kết xuất cần che khuất. Thuộc tính này được định hướng trong AR_COORDINATES_2D_OPENGL_NORMALIZED_DEVICE_COORDINATES và có thể được thay đổi thành AR_COORDINATES_2D_TEXTURE_NORMALIZED bằng cách gọi ArFrame_transformCoordinates2d(). Khi có thể truy cập hình ảnh chiều sâu trong chương trình đổ bóng đối tượng, bạn có thể truy cập trực tiếp các số đo chiều sâu này để xử lý sự cố che khuất.
Tìm hiểu các giá trị độ sâu
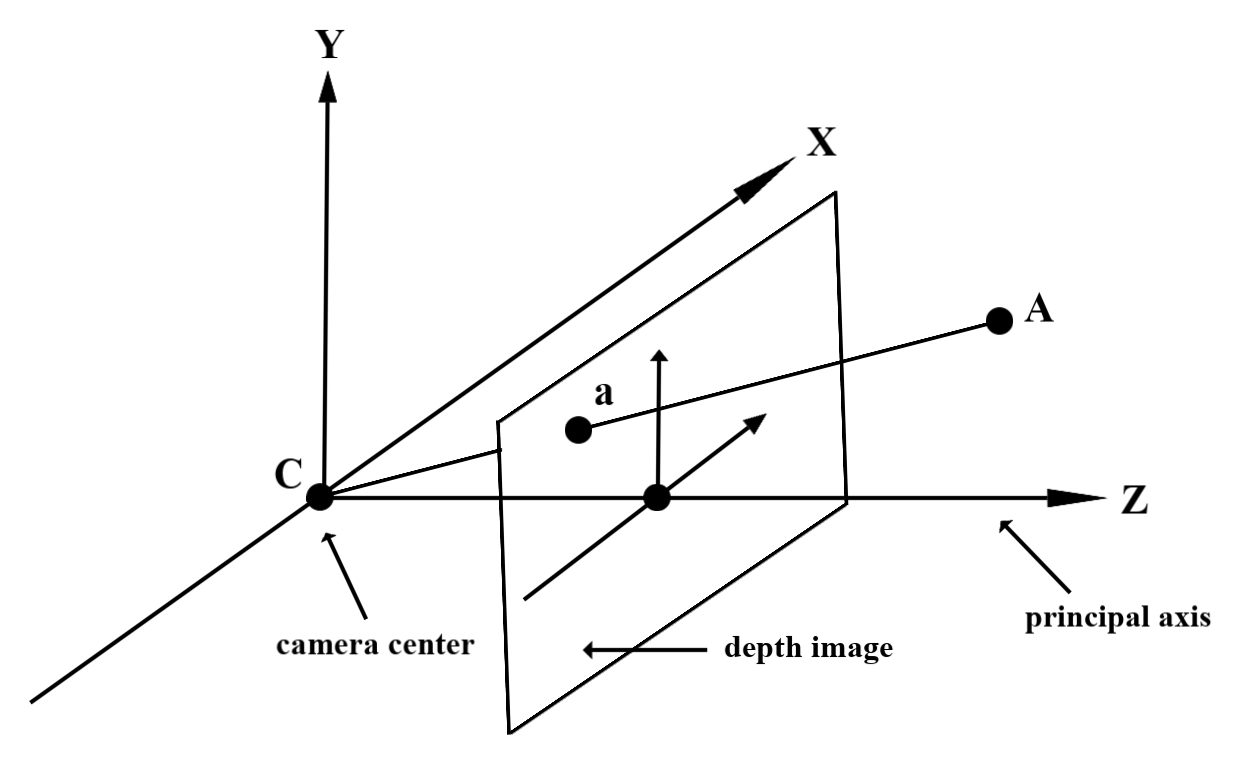
Cho điểm A trên hình học thực tế đã quan sát và điểm 2D a
đại diện cho cùng một điểm trong hình ảnh chiều sâu, giá trị được cho bởi Độ sâu
API tại a bằng độ dài của CA được chiếu lên trục chính.
Đây cũng có thể được gọi là toạ độ z của A so với camera
máy chủ gốc C. Khi làm việc với depth API, bạn cần hiểu rằng
giá trị độ sâu không phải là độ dài của tia CA mà là hình chiếu
nội dung.
Sử dụng độ sâu trong chương trình đổ bóng
Phân tích cú pháp thông tin về chiều sâu của khung hình hiện tại
Sử dụng các hàm trợ giúp DepthGetMillimeters() và DepthGetVisibility() trong chương trình đổ bóng mảnh để truy cập vào thông tin chuyên sâu cho vị trí màn hình hiện tại. Sau đó, hãy sử dụng thông tin này để che khuất có chọn lọc các phần của đối tượng được kết xuất.
// Use DepthGetMillimeters() and DepthGetVisibility() to parse the depth image
// for a given pixel, and compare against the depth of the object to render.
float DepthGetMillimeters(in sampler2D depth_texture, in vec2 depth_uv) {
// Depth is packed into the red and green components of its texture.
// The texture is a normalized format, storing millimeters.
vec3 packedDepthAndVisibility = texture2D(depth_texture, depth_uv).xyz;
return dot(packedDepthAndVisibility.xy, vec2(255.0, 256.0 * 255.0));
}
// Return a value representing how visible or occluded a pixel is relative
// to the depth image. The range is 0.0 (not visible) to 1.0 (completely
// visible).
float DepthGetVisibility(in sampler2D depth_texture, in vec2 depth_uv,
in float asset_depth_mm) {
float depth_mm = DepthGetMillimeters(depth_texture, depth_uv);
// Instead of a hard Z-buffer test, allow the asset to fade into the
// background along a 2 * kDepthTolerancePerMm * asset_depth_mm
// range centered on the background depth.
const float kDepthTolerancePerMm = 0.015f;
float visibility_occlusion = clamp(0.5 * (depth_mm - asset_depth_mm) /
(kDepthTolerancePerMm * asset_depth_mm) + 0.5, 0.0, 1.0);
// Use visibility_depth_near to set the minimum depth value. If using
// this value for occlusion, avoid setting it too close to zero. A depth value
// of zero signifies that there is no depth data to be found.
float visibility_depth_near = 1.0 - InverseLerp(
depth_mm, /*min_depth_mm=*/150.0, /*max_depth_mm=*/200.0);
// Use visibility_depth_far to set the maximum depth value. If the depth
// value is too high (outside the range specified by visibility_depth_far),
// the virtual object may get inaccurately occluded at further distances
// due to too much noise.
float visibility_depth_far = InverseLerp(
depth_mm, /*min_depth_mm=*/7500.0, /*max_depth_mm=*/8000.0);
const float kOcclusionAlpha = 0.0f;
float visibility =
max(max(visibility_occlusion, kOcclusionAlpha),
max(visibility_depth_near, visibility_depth_far));
return visibility;
}
Che khuất đối tượng ảo
Phủ các đối tượng ảo trong phần nội dung của chương trình đổ bóng mảnh. Cập nhật kênh alpha của đối tượng dựa trên độ sâu của kênh. Thao tác này sẽ kết xuất một đối tượng bị che khuất.
// Occlude virtual objects by updating the object’s alpha channel based on its depth.
const float kMetersToMillimeters = 1000.0;
float asset_depth_mm = v_ViewPosition.z * kMetersToMillimeters * -1.;
// Compute the texture coordinates to sample from the depth image.
vec2 depth_uvs = (u_DepthUvTransform * vec3(v_ScreenSpacePosition.xy, 1)).xy;
gl_FragColor.a *= DepthGetVisibility(u_DepthTexture, depth_uvs, asset_depth_mm);
Bạn có thể kết xuất hiệu ứng che khuất bằng cách sử dụng phương pháp kết xuất hai chiều hoặc kết xuất theo từng đối tượng và kết xuất chuyển tiếp. Hiệu quả của mỗi phương pháp phụ thuộc vào mức độ phức tạp của cảnh và các yếu tố khác cần cân nhắc dành riêng cho ứng dụng.
Kết xuất chuyển tiếp trên mỗi đối tượng
Tính năng kết xuất theo từng đối tượng xác định độ che khuất từng pixel của đối tượng trong chương trình đổ bóng chất liệu. Nếu các pixel không hiển thị, thì chúng sẽ bị cắt bớt, thường là bằng cách phối màu alpha, nhờ đó mô phỏng việc che khuất trên thiết bị của người dùng.
Kết xuất hai lượt
Với tính năng kết xuất hai lượt, lượt truyền đầu tiên sẽ kết xuất tất cả nội dung ảo vào một vùng đệm trung gian. Lượt thứ hai kết hợp cảnh ảo với nền dựa trên sự chênh lệch giữa độ sâu của thế giới thực với độ sâu của cảnh ảo. Phương pháp này không yêu cầu thêm hoạt động đổ bóng dành riêng cho đối tượng nào và thường tạo ra kết quả đồng nhất hơn phương thức chuyển tiến.
Chuyển đổi toạ độ giữa hình ảnh máy ảnh và hình ảnh chiều sâu
Hình ảnh thu được bằng ArFrame_acquireCameraImage() có thể có tỷ lệ khung hình khác so với hình ảnh chiều sâu.
Trong trường hợp này, hình ảnh chiều sâu là phần cắt của hình ảnh camera và không phải tất cả pixel trong hình ảnh camera đều có số liệu ước tính độ sâu hợp lệ tương ứng.
Để lấy toạ độ hình ảnh chiều sâu cho toạ độ trên hình ảnh CPU:
const float cpu_image_coordinates[] = {(float)cpu_coordinate_x, (float)cpu_coordinate_y}; float texture_coordinates[2]; ArFrame_transformCoordinates2d( ar_session, ar_frame, AR_COORDINATES_2D_IMAGE_PIXELS, 1, cpu_image_coordinates, AR_COORDINATES_2D_TEXTURE_NORMALIZED, texture_coordinates); if (texture_coordinates[0] < 0 || texture_coordinates[1] < 0) { // There are no valid depth coordinates, because the coordinates in the CPU // image are in the cropped area of the depth image. } else { int depth_image_width = 0; ArImage_getWidth(ar_session, depth_image, &depth_image_width); int depth_image_height = 0; ArImage_getHeight(ar_session, depth_image, &depth_image_height); int depth_coordinate_x = (int)(texture_coordinates[0] * depth_image_width); int depth_coordinate_y = (int)(texture_coordinates[1] * depth_image_height); }
Để lấy toạ độ hình ảnh CPU cho toạ độ hình ảnh chiều sâu:
int depth_image_width = 0; ArImage_getWidth(ar_session, depth_image, &depth_image_width); int depth_image_height = 0; ArImage_getHeight(ar_session, depth_image, &depth_image_height); float texture_coordinates[] = { (float)depth_coordinate_x / (float)depth_image_width, (float)depth_coordinate_y / (float)depth_image_height}; float cpu_image_coordinates[2]; ArFrame_transformCoordinates2d( ar_session, ar_frame, AR_COORDINATES_2D_TEXTURE_NORMALIZED, 1, texture_coordinates, AR_COORDINATES_2D_IMAGE_PIXELS, cpu_image_coordinates); int cpu_image_coordinate_x = (int)cpu_image_coordinates[0]; int cpu_image_coordinate_y = (int)cpu_image_coordinates[1];
Kiểm tra mức độ tác động sâu
Kiểm thử lượt truy cập cho phép người dùng đặt đối tượng tại vị trí thực tế trong cảnh. Trước đây, các cuộc thử nghiệm va chạm chỉ có thể được tiến hành trên các máy bay được phát hiện, giới hạn các vị trí ở các bề mặt lớn và phẳng, chẳng hạn như kết quả do Android xanh lục thể hiện. Kiểm tra lượt truy cập chuyên sâu tận dụng cả thông tin chiều sâu mượt mà lẫn thông tin chiều sâu thô để cung cấp kết quả lượt truy cập chính xác hơn, ngay cả trên bề mặt không phải là hai chiều phẳng và có kết cấu thấp. Điều này được thể hiện với Android màu đỏ.
Để sử dụng thử nghiệm lượt truy cập có kích hoạt chiều sâu, hãy gọi ArFrame_hitTest() và kiểm tra các AR_TRACKABLE_DEPTH_POINT trong danh sách trả về.
// Create a hit test using the Depth API. ArHitResultList* hit_result_list = NULL; ArHitResultList_create(ar_session, &hit_result_list); ArFrame_hitTest(ar_session, ar_frame, hit_x, hit_y, hit_result_list); int32_t hit_result_list_size = 0; ArHitResultList_getSize(ar_session, hit_result_list, &hit_result_list_size); ArHitResult* ar_hit_result = NULL; for (int32_t i = 0; i < hit_result_list_size; ++i) { ArHitResult* ar_hit = NULL; ArHitResult_create(ar_session, &ar_hit); ArHitResultList_getItem(ar_session, hit_result_list, i, ar_hit); ArTrackable* ar_trackable = NULL; ArHitResult_acquireTrackable(ar_session, ar_hit, &ar_trackable); ArTrackableType ar_trackable_type = AR_TRACKABLE_NOT_VALID; ArTrackable_getType(ar_session, ar_trackable, &ar_trackable_type); // Creates an anchor if a plane or an oriented point was hit. if (AR_TRACKABLE_DEPTH_POINT == ar_trackable_type) { // Do something with the hit result. } ArTrackable_release(ar_trackable); ArHitResult_destroy(ar_hit); } ArHitResultList_destroy(hit_result_list);
Bước tiếp theo
- Cung cấp cảm biến chính xác hơn bằng API Độ sâu thô.
- Hãy tham khảo Phòng thí nghiệm độ sâu ARCore, nơi trình bày các cách khác nhau để truy cập vào dữ liệu độ sâu.